Notas_de_aula_da_unidade_ii.pdf
This document was uploaded by user and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this DMCA report form. Report DMCA
Overview
Download & View Notas_de_aula_da_unidade_ii.pdf as PDF for free.
More details
- Words: 7,488
- Pages: 39
Loading documents preview...
UNIDADE II
39 páginas
RESPOSTA NO DOMÍNIO DO TEMPO A resposta temporal de um sistema de controle consiste na resposta transitória e na resposta estacionária: Resposta transitória: É aquela vai do estado inicial até o estado final. Resposta estacionária: É a forma como a resposta do sistema se comporta quando o tempo tende para o infinito. 1.0 PÓLOS E ZEROS DE UMA FT O uso de pólos e zeros e de sua relação com a resposta do sistema no domínio do tempo é uma técnica de análise e projeto com rapidez, se comparada com a transformada de Laplace ou equações diferenciais. Pólos: Valores da variável S, da TL, que anulam o denominador da FT. Zeros: Valores da variável S, da TL, que anulam o numerador da FT. 1.1 Pólos e zeros de um sistema de primeira ordem
Fig. 2.1 - a) Sistema com entrada e saída; b) diagrama de pólos e zeros
s 2 A B 2 5 35 C(s) s(s 5) s s 5 s s 5 2 3 c (t ) e 5t 5 5
Fig. 2.2 - Diagrama de pólos e zeros de um sistema
(2.1)
(2.2)
UNIDADE II
2
2.0 RESPOSTA DE SISTEMAS DE PRIMEIRA ORDEM Um sistema de primeira ordem pode ser representado pela função de transferência mostrada na Figura (2.3).
Fig. 2.3 - Sistema de primeira ordem Para uma entrada degrau, a resposta c(s) é: a C(s) R (s) G(s) s(s a )
(2.3)
Aplicando a transformada de Laplace inversa resulta:
c( t ) c f ( t ) c n ( t ) 1 e at
(2.4)
onde o pólo da entrada gerou a resposta forçada cf (t) = 1 e o pólo do sistema em -a gerou a resposta natural c n(t) = -e-at. Fazendo t = 1/a na Equação (2.4) tem-se:
c (t ) t 1 a 1 e at
t 1a
10,37 0,63
onde 1/a é a constante de tempo de resposta, que é o tempo necessário para que a resposta atinja 63% do valor final.
Fig. 2.4 - Resposta de um sistema de primeira ordem a um degrau unitário
UNIDADE II
3
Quanto mais próximo for o pólo do eixo imaginário, mais lenta é a resposta do sistema. O tempo de subida Tr e o tempo de assentamento Ts, São outras especificações da resposta transitória: Através da Equação (2.4) tem-se: 2.302 0,105 2,197 Tr a a a
e o tempo de assentamento é o tempo necessário para que a resposta atinja 98% do valor final e permaneça. Fazendo c(t) = 0,98 e usando a Equação (2.4) tem-se: 4 Ts a
2.1 FT de primeira ordem obtidas experimentalmente Considere-se um sistema de primeira ordem simples: K G (s) s a
cuja resposta ao degrau é:
K K /a K /a C(s) s(s a ) s s a
(2.5)
Supondo que a resposta ao degrau seja dada pela Figura (2.5), a constante de tempo é 0,63x0,72 = 0,45, ou seja, 0,13s.
Fig. 2.5 - Resposta ao degrau de um sistema de primeira ordem Neste caso, a=1/0,13=7,7. Com base na Equação (2.5) a resposta no tempo é: K K c (t ) e at a a
UNIDADE II
4
para t muito grande,
K c(t ) K 0,72x 7,7 5,54 a
A curva de resposta da Figura (2.5) foi obtida usando a seguinte FT: 5 G (s) s 7
3.0 RESPOSTA DE SISTEMAS DE SEGUNDA ORDEM Enquanto um sistema de primeira ordem, a variação de um parâmetro muda simplesmente a velocidade de resposta, nos sistemas de segunda ordem a forma de resposta também é alterada. A forma geral de um sistema de segunda ordem é dada pelo bloco da Figura (2.6).
Fig. 2.6 - forma geral de um sistema de Segunda ordem Dependendo dos parâmetros do sistema, as respostas podem ser: superamortecidas, sobreamortecidas, não-amortecidas e criticamente amortecidas. As Figuras (2.7, 2.8, 2.9 e 2.10) mostram as curvas de resposta ao degrau em função dos parâmetros do sistema.
a)
b)
c) Fig. 2.7 - Sistema superamortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
UNIDADE II
5
c) Fig. 2.8 - Sistema subamortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
c) Fig. 2.9 - Sistema não-amortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
c) Fig. 2.10 - Sistema criticamente amortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
UNIDADE II
6
Fig. 2.11 - Componentes da resposta ao degrau gerada pelos pólos complexos 3.1 Sistema de Segunda ordem geral Frequência natural, n - Frequência de oscilação do sistema de segunda ordem sem amortecimento. Frequência natural, d - Frequência de oscilação do sistema de segunda ordem com amortecimento. Fator de amortecimento - é a relação entre o valor da constante de amortecimento real e o valor crítico desta constante. Para a função de transferência da Figura (2.12) tem-se:
Fig. 2.12 - FT geral de um sistema de segunda ordem onde a é constante de amortecimento efetiva do sistema. As raízes do polinômio são:
m1,2
a j 4b a 2 j d 2
(2.6)
se a2 = 4b, as raízes são reais e iguais e o sistema é dito criticamente amortecido e a constante de amortecimento crítico é dada por 2 b . logo
amortecimento real a amortecimento crítico 2 b
(2.7)
Quando é inferior a unidade, as raízes são complexas e o transitório é uma senóide amortecida (subamortecida). Quando é maior que a unidade, as raízes são reais e a resposta é superamortecida. Para um sistema subamortecido a frequência natural n é dada por:
UNIDADE II
7 n b
(2.8)
Neste caso, o polinômio é dado por:
2n G (s) 2 s 2 n s 2n da Equação (2.9), logo
(2.9)
a n que representa a parte real. 2 2 j d n j n 1
(2.10)
A resposta transitória em termos de n e neste caso é:
c( t ) Aen t sen(n 12 t ) Quanto maior for n , mais rápido decairá o transitório e
(2.11)
d
aumenta com o
aumento de n e diminui com o aumento de . As Figuras (2.13, 2.14, 2.15 e 2.16) mostram como varia a resposta do sistema em função do fator de amortecimento.
Fig.2.13 - Sistema com fator de amortecimento nulo
Fig. 2.14 - Sistema com fator de amortecimento menor que 1
Fig. 2.15 - Sistema com fator de amortecimento igual a 1
UNIDADE II
8
Fig. 2.16 - Sistema com fator de amortecimento maior que 1 Sistemas de Segunda ordem subamortecidos A transformada da resposta C(s) é a transformada da entrada multiplicada pela FT dada por (2.9):
2n
k k s k 3 C(s) 2 12 2 2 s(s 2 n s n ) s s 2n s 2n Expandindo-se em frações parciais tem-se: (s n ) n 1 2 1 1 C (s) 2 s s n 2n (1 2 )
(2.10)
(2.11)
A transforma de Laplace fornece: c (t ) 1 e
2 2 cos n 1 t sen n 1 t 2 1
n t
(2.12)
c (t ) 1
onde
2 e nt cos n 1 t 2 1
1
tg 1 ( 1 2 )
Fig. 2.17 - Resposta de um sistema subamortecido
UNIDADE II
9
Outros parâmetros associados à resposta subamortecida são: 1. Instante de pico Tp : Tempo necessário para a resposta alcançar o primeiro valor de pico (máximo). 2. Ultrapassagem, %UP: O quanto o pico máximo ultrapassa, em percentual, o valor de estado estacionário. 3. Tempo de assentamento Ts: Tempo necessário que a resposta permaneça no interior de uma faixa de 2%, em torno do valor de estado estacionário. 4. Tempo de subida T r: Tempo necessário para que a resposta vá de 0,1 a 0,9 do valor final.
Fig. 2.18 - Especificações da resposta de um sistema subamortecido Cálculo do valor de T p O valor de T p é encontrado derivando (2.12) e obtendo o primeiro instante de passagem por zero, depois de T=0. Esta tarefa é simplificada através da derivação no domínio da frequência, usando o ítem 7 da Tabela (1.2) (Unidade 1) e supondo as condições iniciais nulas tem-se:
2n [c ( t)] sC(s ) 2 2 s 2n s n
(2.13)
2
n 2 2 2 (s n ) n (1 )
n
2
n 1
1 2 2 2 2 (s n ) n (1 )
logo
c (t )
n 2
1
2 e n t sen n 1 t
(2.14)
UNIDADE II
10
Igualando a derivada a zero resulta:
n 1 2 t n ou
(2.15)
n t n 1 2 Fazendo n=1 tem-se:
Tp n 1 2
(2.16)
Cálculo de % UP Com base na Figura (2.18) tem-se: c c %UP max final 100 c final
(2.17)
O valor c max é obtido calculando o valor de c(t) em (2.12), no instante de pico T p dado por (2.16): ( 12 ) cmax c (Tp ) 1 e cos sen 2 1 12 1 e
(2.18)
Pela resposta ao degrau calculada na Equação (2.12): c final 1
(2.19)
Substituindo (2.18) e (2.19) em (2.17) tem-se: 12 % UP e 100
De (2.20) pode-se tirar o valor de
(2.20)
que é dado por: Ln (%UP / 100 2
2
Ln (%UP / 100)
(2.21)
Fig. 2.19 - Ultrapassagem percentual em função do fator de amortecimento
UNIDADE II
11
Cálculo de T s Usando a definição do tempo de assentamento, a parcela responsável pelo amortecimento em (2.12) é:
e n Ts
logo
1
0,02
(2.22)
Ln( 0.02 12 ) Ts n
(2.23)
2
1
A Equação (2.23) varia de 3,91 a 4,47 para variando de 0 a 0,9. Uma aproximação para o tempo de assentamento pode ser usada como: 4 Ts (2.24) n Tempo de subida T r Não é possível obter uma relação analítica precisa entre o tempo de subida e a relação de amortecimento. Isto se faz calculando T r para cada valor de em (2.12).
Fig. 2.20 - Tempo de subida normalizado versus razão de amortecimento 3.2 FT de segunda ordem obtidas experimentalmente Dada a curva obtida em laboratório, pode-se medir o sobresinal (%U) e o tempo de assentamento, de onde é possível obter os pólos e por conseguinte o denominador. O numerador pode ser encontrado como no sistema de primeira ordem. Exemplo: Obter , n , Ts , Tp , Tre %UP de um sistema cuja FT é: 361 G (s ) 2 s 16s 361
UNIDADE II
12 n 361 19rad / s
2 n 16 0,421
e
4 4 Ts 0,5s n 0,451 19
Tp 0,182s n 1 2
e
A partir da Figura (2.20):
n Tr 1,4998 Tr 0,079s e
% UP
12 e 100 23,3%
3.3 Resposta de sistemas com pólos adicionais Considere-se um sistema constituído de três pólos, dois complexos em
n jn 1 2 e um pólo real em - , cuja função de transferência é dada por: 2n
G (s ) (s 2 2n 2n ) s
(2.25)
A partir da equação em frações parciais tem-se: A B(s n ) Cd D C(s) 2 s s s 2
n
(2.26)
d
A resposta no domínio do tempo é: c( t ) Au(t ) e nt B cos d t C sen d t Det
Fig. 2.21 - Diagrama de pólos
Fig. 2.22 - Resposta dos componentes
(2.27)
UNIDADE II
13
1. Caso I - r1 e não é muito maior do que n . 2. Caso II - r 2 e é muito maior do que n . 3. Caso III - Exemplo: Obter as respostas ao degrau de cada uma das funções de transferência mostradas nas equações abaixo: 24,542 G 1 (s ) 2 s 4s 24,542
245,42 s 10s2 4s 24,542
G 2 (s)
73,626 s 3s 4s 24,542
G 3 (s )
2
As respostas ao degrau para as FT acima são:
c1 ( t ) 11,09e2 t cos(4,532t 23,8o ) c 2 ( t ) 1 0,29e 10t 1,189e 2 t cos( 4,532 t 53,34o ) c3 t ) 1 1,14e 3t 0,707e 2 t cos(4,532t 78,63o ) As três respostas estão plotadas na Figura (2.23).
Fig. 2.23 - Resposta ao degrau dos sistemas G1(s), G2 (s) e G3(s) Exemplo: Determinar a validade de uma aproximação de segunda ordem para cada uma das FT mostradas abaixo: 185,7(s 7) s 6,5 s 10 (s 20)
a) G(s)
197,14(s 7) s 6,5 s 10 (s 20)
b) G (s)
UNIDADE II
14
a) Expandindo C(s) em frações parciais resulta: 1 0,8942 1,5918 0,3023 C( s ) s s 20 s 10 s 6 ,5
A aproximação de segunda ordem não é válida porque 0,3023 não é uma ordem de magnitude inferior aos resíduos dos termos de Segunda ordem. b) Expandindo em frações parciais resulta; 1 0,9782 1,9078 0,0704 C( s ) s s 20 s 10 s 6,5
A aproximação de segunda ordem é válida porque 0,0704 é uma aproximação de segunda ordem inferior aos resíduos dos termos de segunda ordem. 3.4 Resposta do sistema com zeros Considere-se um sistema de segunda ordem com pólos em ( 5 j2,828) , adicionando-se zeros em -3, -5 e -10. Os resultados normalizados são mostrados na Figura abaixo.
Fig. 2.24 - Efeito de adicionamento de zero a um sistema com dois pólos - A medida que o zero se afasta dos pólos dominantes a resposta tende à do sistema de Segunda ordem. - Quanto mais próximo o zero estiver dos pólos dominantes, tanto maior será seu efeito sobre a resposta transitória. Admita a expansão em frações parciais dada pela Equação abaixo:
s a A B s b s c s b s c
G (s )
b a b c c a c b
s b
s c
(2.28)
UNIDADE II
15
Se o zero estiver afastado dos pólos, a é grande em comparação com b e c, então: a G (s ) (2.29) s b s c Neste caso, o zero se assemelha a um simples fator de ganho e não muda as amplitudes relativas dos componentes da resposta. Uma outra forma de olhar o efeito de um zero é adicionar um zero à FT. Seja C(s) a resposta de um sistema com numerador unitário.
s a C(s) sC(s) aC(s)
(2.30)
Na Equação (2.30), quando a é positivo (zero no semi-plano direito) e o termo derivativo sC(s), for maior do que o termo em escala aC(s), a resposta seguirá inicialmente a derivada em direção oposta à da resposta em escala, ou seja, a resposta começa a se orientar no sentido negativo, embora o valor final seja positivo. Estes sistemas são chamados de fase não- mínima
Fig. 2.25 - Resposta ao degrau de um sistema de fase não-mínima 4.0 ESTABILIDADE A estabilidade é a especificação mais importante do sistema. 1. Um sistema é estável se a resposta natural tender a zero quando o tempo tender ao infinito; 2. Um sistema é instável, se a resposta natural crescer a medida que o tempo tender para o infinito; 3. Um sistema é marginalmente estável quando a resposta natural permanece com uma oscilação constante a medida que o tempo tender para o infinito. A estabilidade de um sistema pode ser verificada analisando a localização dos pólos de malha fechada. Um sistema é instável se tem pelo menos u um pólo no semiplano direito e estável se estão localizados no semiplano esquerdo.
UNIDADE II
16
Fig. 2.26 - Sistema estável
Fig. 2.27 - Sistema instável 4.1 Critério de estabilidade de Routh O critério de estabilidade de Routh possibilita determinar o número de pólos a malha fechada, no semiplano direito, sem fatorar o polinômio do denominador da FT.
Fig. 2.28 - Sistema de Quarta ordem Tab. 2.1 - Tabela inicial de Routh
UNIDADE II
17 Tab. 2.2 - Tabela completa de Routh
O número de raízes de um polinômio que estão no semiplano da direita é igual ao número de mudanças de sinal na primeira coluna. O sistema é estável se não houver mudança de sinal na primeira coluna. Exemplo: O sistema abaixo é instável ou estável?
a)
b) Fig. 2.29 - a) sistema a malha fechada; b) sistema equivalente Tabela de Routh completa
UNIDADE II
18
O sistema é instável e tem dois pólos no semiplano da direita. Casos especiais 1. Zeros somente na primeira coluna Se o primeiro elemento de uma linha for zero, a divisão por zero é necessária. Exemplo: Determine a estabilidade da seguinte função de transferência a malha fechada: C(s ) 10 5 R(s) s 2s4 3s3 6s 2 5s 3
Tab. 2.3 - Tabela de Routh
Admitir um sinal positivo ou negativo para , como mostra a Tabela abaixo:
Se é positivo há uma mudança de sinal da linha s3 para s2 , e outra de s2 para s . O sistema é instável e dois pólos no semiplano direito. Se é negativo o resultado é o mesmo 1
2. Se a tabela tem uma linha completa de zeros
UNIDADE II
19
Exemplo: Determine o número de pólos no semiplano da direita da seguinte função de transferência a malha fechada: C(s) 10 5 4 3 R (s) s 7s 6s 42s 2 8s 56 Ao se construir a Tabela de Routh constata-se que os elementos da terceira linha são nulos. Neste caso, é necessário utilizar um artifício, o qual consiste dos seguintes passos: a) Obter o polinômio corresponde aos coeficientes da linha imediatamente acima, ou seja;
P(s) s4 6s 2 8 b) Derivar P(s) com relação a s. dP(s) 3 4s 12s 0 ds
c) Utilizar esses coeficientes para substituir os zeros da terceira linha e seguir a estrutura padrão.
De acordo com a tabela abaixo o sistema é estável. 4.2 - Projeto de estabilidade via critério de Routh Exemplo: Determine a faixa de valores do ganho k, para o sistema da Figura abaixo, que fará com que o sistema seja estável, instável, e marginalmente estável.
A FT a malha fechada é: C(s) k 3 2 R(s) s 18s 77s k
UNIDADE II
20 Tabela de Routh
O elemento da linha s 1, pode ser negativo, zero, ou positivo, dependendo do valor de k. 1. Se k <1386, todos os termos na primeira coluna serão positivos (sistema estável); 2. Se k >1386, o termo s1 na primeira coluna será negativo (sistema instável); 3. Se k=1386, tem-se uma linha completa de zeros (sistema marginalmente estável). 4.3 Estabilidade no espaço de estados Os autovalores da matriz A são determinados pela equação det(sI - A) = 0, que também levam aos pólos da função de transferência. Exemplo: Verifique a estabilidade do seguinte sistema no espaço de estados: 2 x1 -3
1 7 4
1 0 1 x 0r -5 1
y [0
1 0] x
5.0 ERROS DE ESTADO ESTACIONÁRIO O erro de estado estacionário é a diferença entre a entrada e a saída para uma entrada de teste quando o tempo tende para o infinito. As entradas usadas para análise e teste estão resumidas na Tabela (2.4).
UNIDADE II
21 Tab. 2.4 - Formas de onda de sinais de teste
1. Entrada degrau: determina a capacidade do sistema em se posicionar com relação a um alvo estacionário; 2. Entrada rampa: determina a capacidade do sistema para seguir uma entrada linearmente crescente (rastrear um alvo com velocidade constante); 3. Entrada parabólica: determina a capacidade do sistema de rastrear alvos com aceleração constante. 5.1 Erro de estado estacionário com retroação unitária Considere o sistema com retroação unitária da Figura (2.30).
Fig. 2.30 - Sistema de controle com retroação unitária A expressão para E(s) é:
E( s) R (s) C(s) mas
C(s) E(s)G (s)
(2.31) (2.32)
Substituindo (2.32) em (2.31) tem-se: R (s ) E (s ) 1 G (s)
(2.33)
UNIDADE II
22
Do teorema do valor final tem-se: e lim e (t ) lim sE (s) t
s0
(2.34)
logo para a Equação (2.33) resulta: sR (s) s0 1 G (s )
(2.35)
s(1 s) 1 s0 1 G (s ) 1 lim G ( s)
(2.36)
e() lim
1. Entrada degrau Usando a Equação (2.35) tem-se:
e( ) lim
s 0
O termo: lim G (s) é o ganho estático da FT de percurso direto. Para que (2.36) s0
seja nula, é necessário que: lim G(s)
s 0
(2.37)
Então, para satisfazer a Equação (2.37), G(s) deve ter a seguinte forma:
(s z1 )(s z 2 ).... G (s) n s (s p1 )(s p 2 )...
(2.38)
Para que o limite de (2.38) quando s tender a zero, seja infinito é necessário que o denominador de G(s) seja nulo. Isto só acontece se n1. Isto é, pelo menos um pólo deve estar na origem, para o que o erro seja nulo (curva 1 da Figura 2.31). Se n=0, o erro é constante (curva 2 da Figura 2.31).
Fig. 2.31 - Resposta ao degrau
UNIDADE II
23
2. Entrada rampa Usando a Equação (2.35) com R(s)=1/s2 tem-se: s(1 s2 ) 1 1 lim lim s 0 1 G (s ) s 0 s sG (s ) s 0 sG (s )
e() lim
(2.39)
Para que o erro de estado estacionário seja nulo para uma entrada rampa: lim sG (s) s0
(2.40)
Para satisfazer (2.37), G(s) deve ter a mesma forma da Equação (2.38), com n2. A Figura (2.32) mostra as respostas à entrada rampa: saída 1, para erro nulo (n2); saída 2 para n=1 e saída 3, para n=0.
Fig. 2.32 - Resposta a uma entrada rampa 3. Entrada parabólica Usando a Equação (2.35) com R(s)=1/s3 , obtém-se:
s(1 s3 ) 1 1 lim 2 2 lim 2 s0 1 G (s ) s 0 s s G (s) s 0 s G (s )
e () lim
(2.41)
Para que o erro seja nulo deve-se ter: lim s2 G(s) s0
(2.42)
Neste caso, para que o erro seja nulo deve-se ter n3. Se n=2 o erro de estado estacionário é constante e será infinito se n for zero ou 1. Constantes de erro estático e tipos de sistemas Os três termos do denominador de (2.36, 2.39 e 2.41), determinam os erros de estado estacionário, que são chamados de constantes de erro estático:
UNIDADE II
24 k p lim G (s)
constante de posição
(2.42)
k v lim sG (s)
constante de velocidade
(2.43)
k a lim s2 G(s)
constante de aceleração
(2.44)
s 0
s 0
s0
O tipo de sistema é definido pelo valor de n no denominador. Se n=0, o sistema é tipo zero. Se n=1, o sistema é tipo 1, e tipo 2 se n=2. De acordo com as Equações (2.42, 2.43 e 2.44), os erros de estado estacionário são dados por: 1 1 1. Entrada degrau: e() (2.45) 1 lim G(s) 1 k p s0
2. Entrada rampa:
1 1 e() s lim sG(s) k v
(2.46)
s 0
1 1 3. Entrada parabólica: e () 2 2 s lim s G(s) k a
(2.47)
s0
Tab. (2.5) - Erros e constantes para diferentes tipos de sistemas
Erro de estado estacionário devido à perturbações A vantagem de se usar a retroação é que, independente de quais sejam essas perturbações, pode-se projetar o sistema para seguir o sinal de entrada, com erro pequeno ou nulo. Para o sistema da Figura (2.33):
Fig. 2.33 - Sistema de controle com perturbação
UNIDADE II
25
A transformada da saída é dada por:
C(s) E(s)G1 (s)G 2 (s) D(s)G2 (s)
C( s) R (s) E( s)
mas
(2.48) (2.49)
Substituindo (2.49) em (2.48) obtém-se: 1 G 2 (s) E (s ) R(s ) D(s) 1 G1 (s)G2 (s) 1 G1 (s)G2 (s)
(2.50)
logo s sG 2 (s) R (s ) lim D(s) s 0 1 G1 (s)G 2 (s) s0 1 G1 (s)G 2 (s )
e() lim sE (s ) lim s 0
e R () e D ()
(2.51)
O primeiro termo de (2.51) já é conhecido e o segundo termo, supondo uma perturbação em degrau D(s)=(1/s) é: e D () lim
1
1 lim G1 (s) s 0 G 2 (s ) s 0
(2.52)
A Equação (2.52) mostra que para reduzir o erro devido a perturbação deve-se diminuir o ganho estático G 2(s) ou aumentar o ganho estático G1(s).
Fig. 2.34 - Sistema rearrumado mostrando a perturbação como entrada Erro de estado estacionário para sistemas com retroação não-unitária Os sistemas de controle muitas vezes não apresentam retroação unitária, por causa da compensação utilizada para melhorar o desempenho. O percurso de retroação, pode ser um ganho puro com valor diferente de 1 ou produzir alguma representação dinâmica. Considere-se o sistema da Figura (2.35) , onde G 1(s) é o transdutor de entrada:
Fig. 2.35 - Sistema com retroação não-unitária
UNIDADE II
26
Que pode ser representado pelo diagrama da Figura (2.36):
Fig. 2.36 - Diagrama equivalente da Figura (2.35) onde
H(s)=H 1(s)/G1(s) e G(s)=G1(s)G 2(s)
Somando e subtraindo uma realimentação unitária obtém-se a Figura (2.37)
Fig. 2.37 - Diagrama modificado O diagrama da Figura (2.37) pode ser rearranjado resultando no diagrama da Figura (2.38).
Fig. 2.38 - Diagrama equivalente ao da Figura (2.37) Simplificando o diagrama da Figura (2.38), chega-se ao diagrama da Figura (2.39), com retroação unitária:
Fig. 2.39 - Diagrama com retroação unitária
UNIDADE II
27
Exemplo: Para o sistema da Figura abaixo determine o tipo de sistema, a constante de erro associada ao tipo de sistema e o erro de estado estacionário para uma entrada em degrau unitário. Admita que as unidades de entrada e de saída são as mesmas.
Depois de determinar que o sistema é realmente estável, o primeiro passo é converter o sistema em um sistema equivalente com retroação unitária. 100 G (s ) s(s 10) logo
e
1 H (s ) (s 5)
G (s ) 100(s 5) G e (s ) 3 1 G(s)H(s) G(s) s 15s2 50s 400
Neste caso, tem-se um sistema do tipo zero. 100 5 5 k p lim G e (s) s 0 400 4
logo
O erro de estado estacionário é: 1 1 e () 4 1 k p 1 5 4 6.0 SENSIBILIDADE O grau segundo o qual variações nos parâmetros do sistema afetam as funções de transferência, e portanto o desempenho, é chamado de sensibilidade. A sensibilidade é a variação relativa de uma função e a variação relativa de um parâmetro quando esta tende a zero, ou seja: var iação percentual na função, F P0 variação percentual no parâmetr, P
SF:P lim
F F P F P F lim P0 P P P0 F P F P
lim
(2.53)
Exemplo: Dado o sistema da Figura abaixo, calcular a sensibilidade da FT à variações do parâmetro a. Como é possível reduzir essa sensibilidade?
UNIDADE II
28
A FT a malha fechada é: C(s) k 2 T (s) R (s) s as k Usando a Equação (2.53) tem-se: ks a T a ST:F T a k s2 as k 2 s as k
2
as 2 s as k De acordo com o resultado acima, a sensibilidade pode ser reduzida aumentando o parâmetro k. Exemplo: Determine a sensibilidade do erro de estado estacionário à variações do parâmetro k e do parâmetro a para o sistema da Figura abaixo, com uma entrada degrau.
O erro de estado estacionário deste sistema do tipo zero é: 1 1 ab e() k 1 k p ab k 1 ab E sensibilidade de e() à variações dos parâmetros a e k é: Se: a
a e a (ab k)b ab 2 k 2 e a ab ab k ab k ab k
k e k ab k Se:k 2 e k ab ab k ab k ab k
O resultado acima mostra que a sensibilidade à variações de k e a é menor que um para a e b positivos. A retroação neste caso produz sensibilidade reduzida, para ambos os parâmetros. 7.0 ERRO ESTACIONÁRIO NO ESPAÇO DE ESTADOS Um sistema com uma entrada e uma saída representado no espaço de estados pode ser analisado em relação ao erro de estado estacionário, usando-se o teorema do valor final e a FT a malha fechada, representado por (1.88).
UNIDADE II
29 Y (s ) T (s ) C(SI A) 1 B D U (s )
(2.54)
Considere o sistema a malha fechada dado por: xAx Br
(2.55a)
y Cx
(2.55b)
A transformada de Laplace do erro é:
mas
E (s) C(s) R (s)
(2.56)
Y (s) R (s)T (s)
(2.57)
onde T(s) é a FT a malha fechada. Substituindo (2.57) em (2.56) obtém-se:
E(s) R (s) 1 T (s)
(2.58)
Usando (2.54) para T(s) tem-se:
1 E(s) R (s) 1 C SI A B
(2.59)
Aplicando o teorema do valor final resulta:
1 lim sE(s) lim sR (s) 1 C SI A B s0
s 0
(2.60)
Exemplo: Calcular o erro de estado estacionário, do sistema abaixo, para entradas rampa e degrau unitários. 5 1 A 0 - 2 20 - 10
0 1 ; 1
0 B 0 ; 1
C 1 1
0
Substituindo em (2.60) obtém-se: s3 6s 2 12s 16 e() lim sR (s) s3 6s2 13s 20 s0
Para um degrau unitário R(s)=1/s, e e()=4/5 e para uma rampa unitária R(s)=1/s2, e e()=.
UNIDADE II
30 EXERCÍCIOS DA UNIDADE II
2.1 - Um sistema possui a seguinte função de transferência: 10(s 4)(s 6) G (s ) (s 1)(s 7)(s 8)(s 10) Escrever por inspeção, a saída c(t), em termos genérico se a entrada for um degrau unitário. 50 2.2 - Um sistema possui uma FT G(s) . Obter a constante de tempo T c, o s 50 tempo de assentamento Ts e o tempo de subida, Tr.
2.3 - Escrever, por inspeção, a forma geral da resposta ao degrau para cada uma das FT. 400 a) G (s) 2 s 12s 400 900 b) G (s) 2 s 90ss 900 225 c) G (s) 2 s 305s 225 625 d) G (s) 2 s 625
2.4 - Obter , n , Ts, Tp , Tr e %UP de um sistema cuja função de transferência é: 361 G (s ) 2 s 16s 361
2.5 - Determinar a validade de uma aproximação de segunda ordem, para cada uma das FT abaixo:
700 a) G(s) (s 15)(s 2 4s 100) 360 b) G(s) (s 4)(s2 2s 90) 2.6 - Determinar a validade de uma aproximação de Segunda ordem da resposta ao degrau para as seguintes FT: 185,7(s 7) a) G (s) (s 6,5)(s 10)(s 20) 197,14(s 7) c) G(s) (s 6,9)(s 10)(s 20)
UNIDADE II
31
2.7 - Usar o simulink do MATLAB para reproduzir a Figura abaixo:
2.8 - Para o sistema representado no espaço de estados abaixo: a) Determine y(t) usando as técnicas de espaço de estados e da transformada de Laplace; b) Obtenha os autovalores e os pólos do sistema. 2.9 - Para o sistema representado no espaço de estados abaixo: 0 x -2
2 0 x e -2t ; - 5 1
y 2
1 x e
1 x(0) 2
a) Calcule a matriz de transição de estados; b) Calcule o vetor de estado usando a integral de convolução; c) Obtenha a saída y(t). 2.10 - Considere o sistema mostrado na Figura abaixo a). O coeficiente de amortecimento do sistema é o,158 e a frequência natural não amortecida é 3,16 rad/s. Para melhorar a estabilidade relativa, utilizou-se uma realimentação tacométrica, como mostra a Figura b). Determine o valor de k, de modo que o coeficiente de amortecimento seja 0,5. Desenhe a curvas de resposta ao degrau unitário, do sistema da Figura a) e do sistema da Figura b). Determine também as curvas de erro versus tempo para a resposta a uma rampa unitária de ambos os sistemas.
UNIDADE II
32
2.11 - Utilizando o MATLAB, obtenha a resposta ao degrau unitário, à rampa unitária e ao impulso unitário do seguinte sistema: R(s) 10 2 C(s) s 2s 10 onde R(s) e C(s) são as transformada de Laplace da entrada r(t) e da saída c(t), respectivamente. 2.12 - Determine o intervalo de valores de k para a estabilidade do sistema com realimentação unitária, cuja FT em malha aberta é: k G (s ) s(s 1)(s 2) 2.13 - Considere o sistema de controle de um satélite mostrado na Figura a). A saída do sistema apresenta oscilações continuadas não desejáveis. Este sistema pode ser estabilizado pelo uso de realimentação tacométrica, como mostra a Figura b). Se k/j=4, que valor de kh resultará em coeficiente de amortecimento igual a 0,6?
2.14 - Considere um sistema de controle com retroação unitária, cuja FT a malha fechada é:
C (s ) ks b 2 R (s ) s as b Determine a FT de malha aberta G(s). Mostre que o erro estacionário na resposta à rampa unitária é dada por:
UNIDADE II
33
1 a k e() kv b 2.15 - Considere um sistema de controle com realimentação unitária cuja FT de malha aberta é:
k G (s) s ( js B) Discuta os efeitos que as variações de k e B produzem sobre o erro estacionário da resposta à entrada em rampa unitária. Esboce curvas típicas de resposta à rampa unitária para valores pequenos, médios e elevados de k, supondo que B seja constante. 2.16 - Determinar o erro de estado estacionário, a uma entrada em degrau, para o sistema da Figura abaixo. Repita o problema para uma entrada em rampa unitária. .
2.17 - Determinar a sensibilidade do erro de estado estacionário à variações de k no sistema da Figura abaixo.
2.18 - Determinar o erro de estado estacionário a uma entrada em degrau para o sistema abaixo:
0 A -3
1 ; - 6
0 B 1
e
C 1 1
2.19 - Para o sistema da Figura abaixo, qual o erro de estacionado esperado para uma entrada de 15u(t)?
UNIDADE II
34
2.20 - Um sistema com retroação unitária possui a seguinte FT no percurso direto:
10(s 20)(s 30) G(s ) s (s 25)(s 35) a) Determine o erro de estado estacionário para as seguintes entradas: 15u(t), 15tu(t) e 15t2u(t). b) Repetir para:
10(s 20)(s 30) G (s) 2 s (s 25)(s 35)(s 50) PROGRAMAS MATLAB 01. Resposta ao degrau de FT clf numt1=[24.542]; dent1=[1 4 24.542]; 'T1(s)' T1=tf(numt1,dent1) step(T1)
% Apaga o gráfico existente. % Define o numerador de T1. % Define o denominador de T1. % Exibe título. % Cria e mostra T1(s). % Executa uma demonstração de % gráfico de resposta a um degrau. title('Execução de Teste of T1(s)') % Adiciona legenda. pause 'Execução completa' % Exibe título. [y1,t1]=step(T1); % Executa a resposta de T1 a um % degrau e coleta pontos. numt2=[245.42]; p1=[1 10]; p2=[1 4 24.542];
% Define o numerador de T2. % Define (s+10) no denominador de T2. % Define (s^2+4s+24.542) no % denominador de T2. dent2=conv(p1,p2); % Multiplica (s+10)(s^2+4s+24.542) pelo % denominador de T2. 'T2(s)' % Exibe título. T2=tf(numt2,dent2) % Cria e mostra T2. [y2,t2]=step(T2); % Executa a resposta de T2 a um % degrau e coleta pontos. numt3=[73.626]; % Define o numerador de T3. p3=[1 3]; % Define (s+3) no denominador de T3. dent3=conv(p3,p2); % Multiplica (s+3)(s^2+4s+24.542) pelo % denominador de T3. 'T3(s)' % Exibe título. T3=tf(numt3,dent3) % Cria e mostra T3. [y3,t3]=step(T3); % Executa a resposta de T3 a um % degrau e coleta % pontos. clf % Apaga o gráfico existente. plot(t1,y1,t2,y2,t3,y3) % Plota os pontos coletados com os %três gráficos em uma única figura.
UNIDADE II
35
title('Resposta ao degrau de T1(s),T2(s),e T3(s)') % Adiciona legenda do gráfico. xlabel('Tempo(s)') % Nomeia o eixo dos x como eixo dos tempos. ylabel('Resposta Normalizada') % Nomeia o eixo dos y como % eixo da resposta. text(0.7,0.7,'c3(t)') % Identifica a curva da % resposta ao degrau de T1. text(0.7,1.1,'c2(t)') % Identifica a curva da % resposta ao degrau de T2. text(0.5,1.3,'c1(t)') % Identifica a curva da % resposta ao degrau de T3. pause step(T1,T2,T3) % Usa método alternativo para plotar % as respostas ao degrau. title('Step Responses of T1(s),T2(s),and T3(s)')% Adiciona % legenda do gráfico. Pause 02. Solução no domínio do tempo syms s t tau
% Constrói objetos simbólicos para % a variável de freqüência 's', 't', e 'tau'. A=[0 1;-8 -6] % Cria a matriz A. B=[0;1] % Cria o vetor B. X0=[1;0] % Cria o vetor de condição inicial,X(0). U=1 % Cria u(t). I=[1 0;0 1]; % Cria a matriz identidade. E=((s*I-A)^-1) % Obtém a transformada de Laplace da % matriz de transição de estados, (sI-A)^-1. Fi11=ilaplace(E(1,1)); % Obtém a transformada de % Laplace inversa Fi12=ilaplace(E(1,2)); % de cada elemento Fi21=ilaplace(E(2,1)); % de (sI-A)^-1 Fi22=ilaplace(E(2,2)); % para determinar a matriz de % transição de estados. Fi=[Fi11 Fi12;Fi21 Fi22]; % Forma a matriz de transição de % estados, Fi(t). pretty(Fi) % Apresenta a matriz de transição de % estados, Fi(t), na forma "bonita". Fitmtau=subs(Fi,t,t-tau); % Forma Fi(t-tau). pretty(Fitmtau) % Apresenta Fi(t-tau) na forma "bonita". x=Fi*X0+int(Fitmtau*B*1,tau,0,t); % Calcula x(t). x=simple(x); % Reune os termos semelhantes. x=simplify(x); % Simplifica x(t). pretty(x) % Apresenta x(t) na forma "bonita". Pause 03. Superpõe uma grade reticulada ao gráfico da resposta. clf A=[0 1 0;0 0 1;-24 -26 -9];
% Apaga gráfico existente. % Gera a matriz A.
UNIDADE II
B=[0;0;1]; C=[2 7 1]; D=0; T=ss(A,B,C,D) t=0:0.1:10; grid on step(T,t)
36 % Gera o vetor B. % Gera o vetor C. % Gera D. % Gera objeto LIT , T, no espaço % de estados e mostra o resultado. % Define a faixa de valores % de tempo para o gráfico. % Ativa a colocação de grade no desenho. % Plota a resposta ao degrau para uma dada % faixa de valores de tempo.
Pause 04. Critério de estabilidade de Routh FT:
C 10 (verificar a estabilidade) R s5 2s 4 3s 3 6s 2 5s 3
% -det([si() si();sj() sj()])/sj()
% Gabarito para ser % usado em cada célula. syms e % Constrói um objeto simbólico para % epsilon. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s5=[1 3 5 0 0] % Cria a linha s^5 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s4=[2 6 3 0 0] % Cria a linha s^4 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s5(1) s5(2);s4(1) s4(2)])/s4(1)==0 s3=[e... -det([s5(1) s5(3);s4(1) s4(3)])/s4(1) 0 0];% Cria a linha % s^3 da tabela de Routh % se o primeiro elemento for 0. else s3=[-det([s5(1) s5(2);s4(1) s4(2)])/s4(1)... -det([s5(1) s5(3);s4(1) s4(3)])/s4(1) 0 0];% Cria a linha s^3 da tabela de Routh % se o primeiro elemento não for 0. end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s4(1) s4(2);s3(1) s3(2)])/s3(1)==0 s2=[e ... -det([s4(1) s4(3);s3(1) s3(3)])/s3(1) 0 0];% Cria a linha % s^2 da tabela de Routh % se o primeiro elemento for 0. else s2=[-det([s4(1) s4(2);s3(1) s3(2)])/s3(1) ... -det([s4(1) s4(3);s3(1) s3(3)])/s3(1) 0 0];% Cria a linha % s^2 da tabela de Routh % se o primeiro elemento não for 0. end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s3(1) s3(2);s2(1) s2(2)])/s2(1)==0
UNIDADE II
37
s1=[e ... -det([s3(1) s3(3);s2(1) s2(3)])/s2(1) 0 0];% Cria a linha % s^1 da tabela de Routh % se o primeiro elemento for 0. else s1=[-det([s3(1) s3(2);s2(1) s2(2)])/s2(1) ... -det([s3(1) s3(3);s2(1) s2(3)])/s2(1) 0 0];% Cria a linha % s^1 da tabela de Routh % se o primeiro elemento não for 0 end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s0=[-det([s2(1) s2(2);s1(1) s1(2)])/s1(1) ... -det([s2(1) s2(3);s1(1) s1(3)])/s1(1) 0 0];% Cria a linha % s^0 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s3=simplify(s3); % Simplifica os termos da linha s^3. pretty(s3) % Forma "bonita" da linha s^3. s2=simplify(s2); % Simplifica os termos da linha s^2. pretty(s2) % Forma "bonita" da linha s^2. s1=simplify(s1); % Simplifica os termos da linha s^1. pretty(s1) % Forma "bonita" da linha s^1. s0=simplify(s0); % Simplifica os termos da linha s^0. pretty(s0) % Forma "bonita" da linha s^0. Pause 05. Projeto de estabilidade via Routh k FT: G (calcular os valores de k para o sistema permanecer estável) s(s 7)(s 11)
K=[1:1:2000];
% Define a faixa de valores K de 1 a 2000 em % incrementos de 1. for n=1:length(K); % Definição do número de % repetições do LAÇO DO igual % ao número de valores de K a % serem testados. dent=[1 18 77 K(n)]; % Define o denominador de T(s) para % o enésimo valor de K. poles=roots(dent); % Obtém os pólos para o enésimo valor % de K. r=real(poles); % Forma um vetor contendo as partes % reais dos pólos para K(n). if max(r)>=0, % Testa se a parte real dos pólos obtidos % com o enésimo valor de K é > ou = 0. poles % Mostra primeiro os pólos % com parte real > ou = 0. K=K(n) % Mostra o valor correspondente de K. break % Interrompe o laço se não forem encontrados % pólos no semiplano da direita end % Fim de if. end % Fim do for. Pause
UNIDADE II
38
06. Erro de estado estacionário por meio da constante de erro estático Função de transferência 1 numg=500*poly([-2 -5 -6]); % Define o numerador de G(s). deng=poly([0 -8 -10 -12]); % Define o denominador de G(s). G=tf(numg,deng); % Forma G(s) 'Verificar a Estabilidade' % Exibe título. T=feedback(G,1); % Forma T(s). polos=pole(T) % Mostra os pólos a malha fechada. 'Entrada em Degrau' % Exibe título. Kp=dcgain(G) % Calcula Kp=numg/deng para s=0. ess=1/(1+Kp) % Calcula o erro de estado estacionário % para uma entrada em degrau. Função de transferência 2 'Entrada em Rampa' % Exibe título. numsg=conv([1 0],numg); % Define o numerador de sG(s). densg=poly([0 -8 -10 -12]); % Define o denominador de sG(s). sG=tf(numsg,densg); % Cria sG(s). sG=minreal(sG); % Cancela os termos comuns ao numerador(numsg) % e ao denominador(densg). Kv=dcgain(sG) % Calcula Kv=sG(s) for s=0. ess=1/Kv % Calcula o erro de estado estacionário % uma entrada em rampa. Função de transferência 3 'Entrada em Parábola' % Exibe título. nums2g=conv([1 0 0],numg); % Define o numerador de s^2G(s). dens2g=poly([-8 -10 -12]); % Define o denominador de s^2G(s). s2G=tf(nums2g,dens2g); % Cria s^2G(s) s2G=minreal(s2G); % Cancela os termos comuns ao % numerador(nums2g) e % ao denominador(dens2g). Ka=dcgain(s2G) % Calcula Ka=s^2G(s) para s=0. ess=1/Ka % Calcula o erro de estado estacionário % para uma entrada em parábola. sG=minreal(sG); % Cancela termos comuns ao numerador(numsg) % e ao denominador(densg). Kv=dcgain(sG) % Calcula Kv=sG(s) para s=0. ess=1/Kv % Calcula o erro de estado estacionário para % uma entrada em rampa. 'Entrada em Parábola' % Exibe título. nums2g=conv([1 0 0],numg); % Define o numerador de s^2G(s). dens2g=poly([-8 -10 -12]); % Define o denominador de s^2G(s). s2G=tf(nums2g,dens2g); % Cria s^2G(s) s2G=minreal(s2G); % Cancela termos comuns % ao numerador(nums2g) e % ao denominador(dens2g).
UNIDADE II
Ka=dcgain(s2G) ess=1/Ka
39 % Calcula Ka=s^2G(s) para s=0. % Calcula o erro de estado estacionário para % uma entrada em parábola.
Pause 07. Projeto de ganho para atender a especificação de erro de estado estacionário numgdK=[1 5]; % Define o numerador de G(s)/K. dengdK=poly([0 -6 -7 -8]); % Define o denominador de G(s)/K. GdK=tf(numgdK,dengdK); % Cria G(s)/K numgkv=conv([1 0],numgdK); % Define o numerador de sG(s)/K. dengkv=dengdK; % Define o denominador de sG(s)/K. GKv=tf(numgkv,dengkv); % Cria sG(s)/K. GKv=minreal(GKv); % Cancela termos comuns ao numerador e % ao denominador de sG(s)/K. KvdK=dcgain(GKv) % Calcula (Kv/K)=(numgkv/dengkv) para % s=0. ess=0.1 % Define o erro de estado estacionário. K=1/(ess*KvdK) % Calcula o valor de K. 'Verifica a Estabilidade' % Exibe rótulo. T=feedback(K*GdK,1); % Forma T(s). poles=pole(T) % Mostra os pólos a malha fechada. Pause
39 páginas
RESPOSTA NO DOMÍNIO DO TEMPO A resposta temporal de um sistema de controle consiste na resposta transitória e na resposta estacionária: Resposta transitória: É aquela vai do estado inicial até o estado final. Resposta estacionária: É a forma como a resposta do sistema se comporta quando o tempo tende para o infinito. 1.0 PÓLOS E ZEROS DE UMA FT O uso de pólos e zeros e de sua relação com a resposta do sistema no domínio do tempo é uma técnica de análise e projeto com rapidez, se comparada com a transformada de Laplace ou equações diferenciais. Pólos: Valores da variável S, da TL, que anulam o denominador da FT. Zeros: Valores da variável S, da TL, que anulam o numerador da FT. 1.1 Pólos e zeros de um sistema de primeira ordem
Fig. 2.1 - a) Sistema com entrada e saída; b) diagrama de pólos e zeros
s 2 A B 2 5 35 C(s) s(s 5) s s 5 s s 5 2 3 c (t ) e 5t 5 5
Fig. 2.2 - Diagrama de pólos e zeros de um sistema
(2.1)
(2.2)
UNIDADE II
2
2.0 RESPOSTA DE SISTEMAS DE PRIMEIRA ORDEM Um sistema de primeira ordem pode ser representado pela função de transferência mostrada na Figura (2.3).
Fig. 2.3 - Sistema de primeira ordem Para uma entrada degrau, a resposta c(s) é: a C(s) R (s) G(s) s(s a )
(2.3)
Aplicando a transformada de Laplace inversa resulta:
c( t ) c f ( t ) c n ( t ) 1 e at
(2.4)
onde o pólo da entrada gerou a resposta forçada cf (t) = 1 e o pólo do sistema em -a gerou a resposta natural c n(t) = -e-at. Fazendo t = 1/a na Equação (2.4) tem-se:
c (t ) t 1 a 1 e at
t 1a
10,37 0,63
onde 1/a é a constante de tempo de resposta, que é o tempo necessário para que a resposta atinja 63% do valor final.
Fig. 2.4 - Resposta de um sistema de primeira ordem a um degrau unitário
UNIDADE II
3
Quanto mais próximo for o pólo do eixo imaginário, mais lenta é a resposta do sistema. O tempo de subida Tr e o tempo de assentamento Ts, São outras especificações da resposta transitória: Através da Equação (2.4) tem-se: 2.302 0,105 2,197 Tr a a a
e o tempo de assentamento é o tempo necessário para que a resposta atinja 98% do valor final e permaneça. Fazendo c(t) = 0,98 e usando a Equação (2.4) tem-se: 4 Ts a
2.1 FT de primeira ordem obtidas experimentalmente Considere-se um sistema de primeira ordem simples: K G (s) s a
cuja resposta ao degrau é:
K K /a K /a C(s) s(s a ) s s a
(2.5)
Supondo que a resposta ao degrau seja dada pela Figura (2.5), a constante de tempo é 0,63x0,72 = 0,45, ou seja, 0,13s.
Fig. 2.5 - Resposta ao degrau de um sistema de primeira ordem Neste caso, a=1/0,13=7,7. Com base na Equação (2.5) a resposta no tempo é: K K c (t ) e at a a
UNIDADE II
4
para t muito grande,
K c(t ) K 0,72x 7,7 5,54 a
A curva de resposta da Figura (2.5) foi obtida usando a seguinte FT: 5 G (s) s 7
3.0 RESPOSTA DE SISTEMAS DE SEGUNDA ORDEM Enquanto um sistema de primeira ordem, a variação de um parâmetro muda simplesmente a velocidade de resposta, nos sistemas de segunda ordem a forma de resposta também é alterada. A forma geral de um sistema de segunda ordem é dada pelo bloco da Figura (2.6).
Fig. 2.6 - forma geral de um sistema de Segunda ordem Dependendo dos parâmetros do sistema, as respostas podem ser: superamortecidas, sobreamortecidas, não-amortecidas e criticamente amortecidas. As Figuras (2.7, 2.8, 2.9 e 2.10) mostram as curvas de resposta ao degrau em função dos parâmetros do sistema.
a)
b)
c) Fig. 2.7 - Sistema superamortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
UNIDADE II
5
c) Fig. 2.8 - Sistema subamortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
c) Fig. 2.9 - Sistema não-amortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
a)
b)
c) Fig. 2.10 - Sistema criticamente amortecido; a) função de transferência; b) diagrama de pólos e zeros; c) resposta no tempo
UNIDADE II
6
Fig. 2.11 - Componentes da resposta ao degrau gerada pelos pólos complexos 3.1 Sistema de Segunda ordem geral Frequência natural, n - Frequência de oscilação do sistema de segunda ordem sem amortecimento. Frequência natural, d - Frequência de oscilação do sistema de segunda ordem com amortecimento. Fator de amortecimento - é a relação entre o valor da constante de amortecimento real e o valor crítico desta constante. Para a função de transferência da Figura (2.12) tem-se:
Fig. 2.12 - FT geral de um sistema de segunda ordem onde a é constante de amortecimento efetiva do sistema. As raízes do polinômio são:
m1,2
a j 4b a 2 j d 2
(2.6)
se a2 = 4b, as raízes são reais e iguais e o sistema é dito criticamente amortecido e a constante de amortecimento crítico é dada por 2 b . logo
amortecimento real a amortecimento crítico 2 b
(2.7)
Quando é inferior a unidade, as raízes são complexas e o transitório é uma senóide amortecida (subamortecida). Quando é maior que a unidade, as raízes são reais e a resposta é superamortecida. Para um sistema subamortecido a frequência natural n é dada por:
UNIDADE II
7 n b
(2.8)
Neste caso, o polinômio é dado por:
2n G (s) 2 s 2 n s 2n da Equação (2.9), logo
(2.9)
a n que representa a parte real. 2 2 j d n j n 1
(2.10)
A resposta transitória em termos de n e neste caso é:
c( t ) Aen t sen(n 12 t ) Quanto maior for n , mais rápido decairá o transitório e
(2.11)
d
aumenta com o
aumento de n e diminui com o aumento de . As Figuras (2.13, 2.14, 2.15 e 2.16) mostram como varia a resposta do sistema em função do fator de amortecimento.
Fig.2.13 - Sistema com fator de amortecimento nulo
Fig. 2.14 - Sistema com fator de amortecimento menor que 1
Fig. 2.15 - Sistema com fator de amortecimento igual a 1
UNIDADE II
8
Fig. 2.16 - Sistema com fator de amortecimento maior que 1 Sistemas de Segunda ordem subamortecidos A transformada da resposta C(s) é a transformada da entrada multiplicada pela FT dada por (2.9):
2n
k k s k 3 C(s) 2 12 2 2 s(s 2 n s n ) s s 2n s 2n Expandindo-se em frações parciais tem-se: (s n ) n 1 2 1 1 C (s) 2 s s n 2n (1 2 )
(2.10)
(2.11)
A transforma de Laplace fornece: c (t ) 1 e
2 2 cos n 1 t sen n 1 t 2 1
n t
(2.12)
c (t ) 1
onde
2 e nt cos n 1 t 2 1
1
tg 1 ( 1 2 )
Fig. 2.17 - Resposta de um sistema subamortecido
UNIDADE II
9
Outros parâmetros associados à resposta subamortecida são: 1. Instante de pico Tp : Tempo necessário para a resposta alcançar o primeiro valor de pico (máximo). 2. Ultrapassagem, %UP: O quanto o pico máximo ultrapassa, em percentual, o valor de estado estacionário. 3. Tempo de assentamento Ts: Tempo necessário que a resposta permaneça no interior de uma faixa de 2%, em torno do valor de estado estacionário. 4. Tempo de subida T r: Tempo necessário para que a resposta vá de 0,1 a 0,9 do valor final.
Fig. 2.18 - Especificações da resposta de um sistema subamortecido Cálculo do valor de T p O valor de T p é encontrado derivando (2.12) e obtendo o primeiro instante de passagem por zero, depois de T=0. Esta tarefa é simplificada através da derivação no domínio da frequência, usando o ítem 7 da Tabela (1.2) (Unidade 1) e supondo as condições iniciais nulas tem-se:
2n [c ( t)] sC(s ) 2 2 s 2n s n
(2.13)
2
n 2 2 2 (s n ) n (1 )
n
2
n 1
1 2 2 2 2 (s n ) n (1 )
logo
c (t )
n 2
1
2 e n t sen n 1 t
(2.14)
UNIDADE II
10
Igualando a derivada a zero resulta:
n 1 2 t n ou
(2.15)
n t n 1 2 Fazendo n=1 tem-se:
Tp n 1 2
(2.16)
Cálculo de % UP Com base na Figura (2.18) tem-se: c c %UP max final 100 c final
(2.17)
O valor c max é obtido calculando o valor de c(t) em (2.12), no instante de pico T p dado por (2.16): ( 12 ) cmax c (Tp ) 1 e cos sen 2 1 12 1 e
(2.18)
Pela resposta ao degrau calculada na Equação (2.12): c final 1
(2.19)
Substituindo (2.18) e (2.19) em (2.17) tem-se: 12 % UP e 100
De (2.20) pode-se tirar o valor de
(2.20)
que é dado por: Ln (%UP / 100 2
2
Ln (%UP / 100)
(2.21)
Fig. 2.19 - Ultrapassagem percentual em função do fator de amortecimento
UNIDADE II
11
Cálculo de T s Usando a definição do tempo de assentamento, a parcela responsável pelo amortecimento em (2.12) é:
e n Ts
logo
1
0,02
(2.22)
Ln( 0.02 12 ) Ts n
(2.23)
2
1
A Equação (2.23) varia de 3,91 a 4,47 para variando de 0 a 0,9. Uma aproximação para o tempo de assentamento pode ser usada como: 4 Ts (2.24) n Tempo de subida T r Não é possível obter uma relação analítica precisa entre o tempo de subida e a relação de amortecimento. Isto se faz calculando T r para cada valor de em (2.12).
Fig. 2.20 - Tempo de subida normalizado versus razão de amortecimento 3.2 FT de segunda ordem obtidas experimentalmente Dada a curva obtida em laboratório, pode-se medir o sobresinal (%U) e o tempo de assentamento, de onde é possível obter os pólos e por conseguinte o denominador. O numerador pode ser encontrado como no sistema de primeira ordem. Exemplo: Obter , n , Ts , Tp , Tre %UP de um sistema cuja FT é: 361 G (s ) 2 s 16s 361
UNIDADE II
12 n 361 19rad / s
2 n 16 0,421
e
4 4 Ts 0,5s n 0,451 19
Tp 0,182s n 1 2
e
A partir da Figura (2.20):
n Tr 1,4998 Tr 0,079s e
% UP
12 e 100 23,3%
3.3 Resposta de sistemas com pólos adicionais Considere-se um sistema constituído de três pólos, dois complexos em
n jn 1 2 e um pólo real em - , cuja função de transferência é dada por: 2n
G (s ) (s 2 2n 2n ) s
(2.25)
A partir da equação em frações parciais tem-se: A B(s n ) Cd D C(s) 2 s s s 2
n
(2.26)
d
A resposta no domínio do tempo é: c( t ) Au(t ) e nt B cos d t C sen d t Det
Fig. 2.21 - Diagrama de pólos
Fig. 2.22 - Resposta dos componentes
(2.27)
UNIDADE II
13
1. Caso I - r1 e não é muito maior do que n . 2. Caso II - r 2 e é muito maior do que n . 3. Caso III - Exemplo: Obter as respostas ao degrau de cada uma das funções de transferência mostradas nas equações abaixo: 24,542 G 1 (s ) 2 s 4s 24,542
245,42 s 10s2 4s 24,542
G 2 (s)
73,626 s 3s 4s 24,542
G 3 (s )
2
As respostas ao degrau para as FT acima são:
c1 ( t ) 11,09e2 t cos(4,532t 23,8o ) c 2 ( t ) 1 0,29e 10t 1,189e 2 t cos( 4,532 t 53,34o ) c3 t ) 1 1,14e 3t 0,707e 2 t cos(4,532t 78,63o ) As três respostas estão plotadas na Figura (2.23).
Fig. 2.23 - Resposta ao degrau dos sistemas G1(s), G2 (s) e G3(s) Exemplo: Determinar a validade de uma aproximação de segunda ordem para cada uma das FT mostradas abaixo: 185,7(s 7) s 6,5 s 10 (s 20)
a) G(s)
197,14(s 7) s 6,5 s 10 (s 20)
b) G (s)
UNIDADE II
14
a) Expandindo C(s) em frações parciais resulta: 1 0,8942 1,5918 0,3023 C( s ) s s 20 s 10 s 6 ,5
A aproximação de segunda ordem não é válida porque 0,3023 não é uma ordem de magnitude inferior aos resíduos dos termos de Segunda ordem. b) Expandindo em frações parciais resulta; 1 0,9782 1,9078 0,0704 C( s ) s s 20 s 10 s 6,5
A aproximação de segunda ordem é válida porque 0,0704 é uma aproximação de segunda ordem inferior aos resíduos dos termos de segunda ordem. 3.4 Resposta do sistema com zeros Considere-se um sistema de segunda ordem com pólos em ( 5 j2,828) , adicionando-se zeros em -3, -5 e -10. Os resultados normalizados são mostrados na Figura abaixo.
Fig. 2.24 - Efeito de adicionamento de zero a um sistema com dois pólos - A medida que o zero se afasta dos pólos dominantes a resposta tende à do sistema de Segunda ordem. - Quanto mais próximo o zero estiver dos pólos dominantes, tanto maior será seu efeito sobre a resposta transitória. Admita a expansão em frações parciais dada pela Equação abaixo:
s a A B s b s c s b s c
G (s )
b a b c c a c b
s b
s c
(2.28)
UNIDADE II
15
Se o zero estiver afastado dos pólos, a é grande em comparação com b e c, então: a G (s ) (2.29) s b s c Neste caso, o zero se assemelha a um simples fator de ganho e não muda as amplitudes relativas dos componentes da resposta. Uma outra forma de olhar o efeito de um zero é adicionar um zero à FT. Seja C(s) a resposta de um sistema com numerador unitário.
s a C(s) sC(s) aC(s)
(2.30)
Na Equação (2.30), quando a é positivo (zero no semi-plano direito) e o termo derivativo sC(s), for maior do que o termo em escala aC(s), a resposta seguirá inicialmente a derivada em direção oposta à da resposta em escala, ou seja, a resposta começa a se orientar no sentido negativo, embora o valor final seja positivo. Estes sistemas são chamados de fase não- mínima
Fig. 2.25 - Resposta ao degrau de um sistema de fase não-mínima 4.0 ESTABILIDADE A estabilidade é a especificação mais importante do sistema. 1. Um sistema é estável se a resposta natural tender a zero quando o tempo tender ao infinito; 2. Um sistema é instável, se a resposta natural crescer a medida que o tempo tender para o infinito; 3. Um sistema é marginalmente estável quando a resposta natural permanece com uma oscilação constante a medida que o tempo tender para o infinito. A estabilidade de um sistema pode ser verificada analisando a localização dos pólos de malha fechada. Um sistema é instável se tem pelo menos u um pólo no semiplano direito e estável se estão localizados no semiplano esquerdo.
UNIDADE II
16
Fig. 2.26 - Sistema estável
Fig. 2.27 - Sistema instável 4.1 Critério de estabilidade de Routh O critério de estabilidade de Routh possibilita determinar o número de pólos a malha fechada, no semiplano direito, sem fatorar o polinômio do denominador da FT.
Fig. 2.28 - Sistema de Quarta ordem Tab. 2.1 - Tabela inicial de Routh
UNIDADE II
17 Tab. 2.2 - Tabela completa de Routh
O número de raízes de um polinômio que estão no semiplano da direita é igual ao número de mudanças de sinal na primeira coluna. O sistema é estável se não houver mudança de sinal na primeira coluna. Exemplo: O sistema abaixo é instável ou estável?
a)
b) Fig. 2.29 - a) sistema a malha fechada; b) sistema equivalente Tabela de Routh completa
UNIDADE II
18
O sistema é instável e tem dois pólos no semiplano da direita. Casos especiais 1. Zeros somente na primeira coluna Se o primeiro elemento de uma linha for zero, a divisão por zero é necessária. Exemplo: Determine a estabilidade da seguinte função de transferência a malha fechada: C(s ) 10 5 R(s) s 2s4 3s3 6s 2 5s 3
Tab. 2.3 - Tabela de Routh
Admitir um sinal positivo ou negativo para , como mostra a Tabela abaixo:
Se é positivo há uma mudança de sinal da linha s3 para s2 , e outra de s2 para s . O sistema é instável e dois pólos no semiplano direito. Se é negativo o resultado é o mesmo 1
2. Se a tabela tem uma linha completa de zeros
UNIDADE II
19
Exemplo: Determine o número de pólos no semiplano da direita da seguinte função de transferência a malha fechada: C(s) 10 5 4 3 R (s) s 7s 6s 42s 2 8s 56 Ao se construir a Tabela de Routh constata-se que os elementos da terceira linha são nulos. Neste caso, é necessário utilizar um artifício, o qual consiste dos seguintes passos: a) Obter o polinômio corresponde aos coeficientes da linha imediatamente acima, ou seja;
P(s) s4 6s 2 8 b) Derivar P(s) com relação a s. dP(s) 3 4s 12s 0 ds
c) Utilizar esses coeficientes para substituir os zeros da terceira linha e seguir a estrutura padrão.
De acordo com a tabela abaixo o sistema é estável. 4.2 - Projeto de estabilidade via critério de Routh Exemplo: Determine a faixa de valores do ganho k, para o sistema da Figura abaixo, que fará com que o sistema seja estável, instável, e marginalmente estável.
A FT a malha fechada é: C(s) k 3 2 R(s) s 18s 77s k
UNIDADE II
20 Tabela de Routh
O elemento da linha s 1, pode ser negativo, zero, ou positivo, dependendo do valor de k. 1. Se k <1386, todos os termos na primeira coluna serão positivos (sistema estável); 2. Se k >1386, o termo s1 na primeira coluna será negativo (sistema instável); 3. Se k=1386, tem-se uma linha completa de zeros (sistema marginalmente estável). 4.3 Estabilidade no espaço de estados Os autovalores da matriz A são determinados pela equação det(sI - A) = 0, que também levam aos pólos da função de transferência. Exemplo: Verifique a estabilidade do seguinte sistema no espaço de estados: 2 x1 -3
1 7 4
1 0 1 x 0r -5 1
y [0
1 0] x
5.0 ERROS DE ESTADO ESTACIONÁRIO O erro de estado estacionário é a diferença entre a entrada e a saída para uma entrada de teste quando o tempo tende para o infinito. As entradas usadas para análise e teste estão resumidas na Tabela (2.4).
UNIDADE II
21 Tab. 2.4 - Formas de onda de sinais de teste
1. Entrada degrau: determina a capacidade do sistema em se posicionar com relação a um alvo estacionário; 2. Entrada rampa: determina a capacidade do sistema para seguir uma entrada linearmente crescente (rastrear um alvo com velocidade constante); 3. Entrada parabólica: determina a capacidade do sistema de rastrear alvos com aceleração constante. 5.1 Erro de estado estacionário com retroação unitária Considere o sistema com retroação unitária da Figura (2.30).
Fig. 2.30 - Sistema de controle com retroação unitária A expressão para E(s) é:
E( s) R (s) C(s) mas
C(s) E(s)G (s)
(2.31) (2.32)
Substituindo (2.32) em (2.31) tem-se: R (s ) E (s ) 1 G (s)
(2.33)
UNIDADE II
22
Do teorema do valor final tem-se: e lim e (t ) lim sE (s) t
s0
(2.34)
logo para a Equação (2.33) resulta: sR (s) s0 1 G (s )
(2.35)
s(1 s) 1 s0 1 G (s ) 1 lim G ( s)
(2.36)
e() lim
1. Entrada degrau Usando a Equação (2.35) tem-se:
e( ) lim
s 0
O termo: lim G (s) é o ganho estático da FT de percurso direto. Para que (2.36) s0
seja nula, é necessário que: lim G(s)
s 0
(2.37)
Então, para satisfazer a Equação (2.37), G(s) deve ter a seguinte forma:
(s z1 )(s z 2 ).... G (s) n s (s p1 )(s p 2 )...
(2.38)
Para que o limite de (2.38) quando s tender a zero, seja infinito é necessário que o denominador de G(s) seja nulo. Isto só acontece se n1. Isto é, pelo menos um pólo deve estar na origem, para o que o erro seja nulo (curva 1 da Figura 2.31). Se n=0, o erro é constante (curva 2 da Figura 2.31).
Fig. 2.31 - Resposta ao degrau
UNIDADE II
23
2. Entrada rampa Usando a Equação (2.35) com R(s)=1/s2 tem-se: s(1 s2 ) 1 1 lim lim s 0 1 G (s ) s 0 s sG (s ) s 0 sG (s )
e() lim
(2.39)
Para que o erro de estado estacionário seja nulo para uma entrada rampa: lim sG (s) s0
(2.40)
Para satisfazer (2.37), G(s) deve ter a mesma forma da Equação (2.38), com n2. A Figura (2.32) mostra as respostas à entrada rampa: saída 1, para erro nulo (n2); saída 2 para n=1 e saída 3, para n=0.
Fig. 2.32 - Resposta a uma entrada rampa 3. Entrada parabólica Usando a Equação (2.35) com R(s)=1/s3 , obtém-se:
s(1 s3 ) 1 1 lim 2 2 lim 2 s0 1 G (s ) s 0 s s G (s) s 0 s G (s )
e () lim
(2.41)
Para que o erro seja nulo deve-se ter: lim s2 G(s) s0
(2.42)
Neste caso, para que o erro seja nulo deve-se ter n3. Se n=2 o erro de estado estacionário é constante e será infinito se n for zero ou 1. Constantes de erro estático e tipos de sistemas Os três termos do denominador de (2.36, 2.39 e 2.41), determinam os erros de estado estacionário, que são chamados de constantes de erro estático:
UNIDADE II
24 k p lim G (s)
constante de posição
(2.42)
k v lim sG (s)
constante de velocidade
(2.43)
k a lim s2 G(s)
constante de aceleração
(2.44)
s 0
s 0
s0
O tipo de sistema é definido pelo valor de n no denominador. Se n=0, o sistema é tipo zero. Se n=1, o sistema é tipo 1, e tipo 2 se n=2. De acordo com as Equações (2.42, 2.43 e 2.44), os erros de estado estacionário são dados por: 1 1 1. Entrada degrau: e() (2.45) 1 lim G(s) 1 k p s0
2. Entrada rampa:
1 1 e() s lim sG(s) k v
(2.46)
s 0
1 1 3. Entrada parabólica: e () 2 2 s lim s G(s) k a
(2.47)
s0
Tab. (2.5) - Erros e constantes para diferentes tipos de sistemas
Erro de estado estacionário devido à perturbações A vantagem de se usar a retroação é que, independente de quais sejam essas perturbações, pode-se projetar o sistema para seguir o sinal de entrada, com erro pequeno ou nulo. Para o sistema da Figura (2.33):
Fig. 2.33 - Sistema de controle com perturbação
UNIDADE II
25
A transformada da saída é dada por:
C(s) E(s)G1 (s)G 2 (s) D(s)G2 (s)
C( s) R (s) E( s)
mas
(2.48) (2.49)
Substituindo (2.49) em (2.48) obtém-se: 1 G 2 (s) E (s ) R(s ) D(s) 1 G1 (s)G2 (s) 1 G1 (s)G2 (s)
(2.50)
logo s sG 2 (s) R (s ) lim D(s) s 0 1 G1 (s)G 2 (s) s0 1 G1 (s)G 2 (s )
e() lim sE (s ) lim s 0
e R () e D ()
(2.51)
O primeiro termo de (2.51) já é conhecido e o segundo termo, supondo uma perturbação em degrau D(s)=(1/s) é: e D () lim
1
1 lim G1 (s) s 0 G 2 (s ) s 0
(2.52)
A Equação (2.52) mostra que para reduzir o erro devido a perturbação deve-se diminuir o ganho estático G 2(s) ou aumentar o ganho estático G1(s).
Fig. 2.34 - Sistema rearrumado mostrando a perturbação como entrada Erro de estado estacionário para sistemas com retroação não-unitária Os sistemas de controle muitas vezes não apresentam retroação unitária, por causa da compensação utilizada para melhorar o desempenho. O percurso de retroação, pode ser um ganho puro com valor diferente de 1 ou produzir alguma representação dinâmica. Considere-se o sistema da Figura (2.35) , onde G 1(s) é o transdutor de entrada:
Fig. 2.35 - Sistema com retroação não-unitária
UNIDADE II
26
Que pode ser representado pelo diagrama da Figura (2.36):
Fig. 2.36 - Diagrama equivalente da Figura (2.35) onde
H(s)=H 1(s)/G1(s) e G(s)=G1(s)G 2(s)
Somando e subtraindo uma realimentação unitária obtém-se a Figura (2.37)
Fig. 2.37 - Diagrama modificado O diagrama da Figura (2.37) pode ser rearranjado resultando no diagrama da Figura (2.38).
Fig. 2.38 - Diagrama equivalente ao da Figura (2.37) Simplificando o diagrama da Figura (2.38), chega-se ao diagrama da Figura (2.39), com retroação unitária:
Fig. 2.39 - Diagrama com retroação unitária
UNIDADE II
27
Exemplo: Para o sistema da Figura abaixo determine o tipo de sistema, a constante de erro associada ao tipo de sistema e o erro de estado estacionário para uma entrada em degrau unitário. Admita que as unidades de entrada e de saída são as mesmas.
Depois de determinar que o sistema é realmente estável, o primeiro passo é converter o sistema em um sistema equivalente com retroação unitária. 100 G (s ) s(s 10) logo
e
1 H (s ) (s 5)
G (s ) 100(s 5) G e (s ) 3 1 G(s)H(s) G(s) s 15s2 50s 400
Neste caso, tem-se um sistema do tipo zero. 100 5 5 k p lim G e (s) s 0 400 4
logo
O erro de estado estacionário é: 1 1 e () 4 1 k p 1 5 4 6.0 SENSIBILIDADE O grau segundo o qual variações nos parâmetros do sistema afetam as funções de transferência, e portanto o desempenho, é chamado de sensibilidade. A sensibilidade é a variação relativa de uma função e a variação relativa de um parâmetro quando esta tende a zero, ou seja: var iação percentual na função, F P0 variação percentual no parâmetr, P
SF:P lim
F F P F P F lim P0 P P P0 F P F P
lim
(2.53)
Exemplo: Dado o sistema da Figura abaixo, calcular a sensibilidade da FT à variações do parâmetro a. Como é possível reduzir essa sensibilidade?
UNIDADE II
28
A FT a malha fechada é: C(s) k 2 T (s) R (s) s as k Usando a Equação (2.53) tem-se: ks a T a ST:F T a k s2 as k 2 s as k
2
as 2 s as k De acordo com o resultado acima, a sensibilidade pode ser reduzida aumentando o parâmetro k. Exemplo: Determine a sensibilidade do erro de estado estacionário à variações do parâmetro k e do parâmetro a para o sistema da Figura abaixo, com uma entrada degrau.
O erro de estado estacionário deste sistema do tipo zero é: 1 1 ab e() k 1 k p ab k 1 ab E sensibilidade de e() à variações dos parâmetros a e k é: Se: a
a e a (ab k)b ab 2 k 2 e a ab ab k ab k ab k
k e k ab k Se:k 2 e k ab ab k ab k ab k
O resultado acima mostra que a sensibilidade à variações de k e a é menor que um para a e b positivos. A retroação neste caso produz sensibilidade reduzida, para ambos os parâmetros. 7.0 ERRO ESTACIONÁRIO NO ESPAÇO DE ESTADOS Um sistema com uma entrada e uma saída representado no espaço de estados pode ser analisado em relação ao erro de estado estacionário, usando-se o teorema do valor final e a FT a malha fechada, representado por (1.88).
UNIDADE II
29 Y (s ) T (s ) C(SI A) 1 B D U (s )
(2.54)
Considere o sistema a malha fechada dado por: xAx Br
(2.55a)
y Cx
(2.55b)
A transformada de Laplace do erro é:
mas
E (s) C(s) R (s)
(2.56)
Y (s) R (s)T (s)
(2.57)
onde T(s) é a FT a malha fechada. Substituindo (2.57) em (2.56) obtém-se:
E(s) R (s) 1 T (s)
(2.58)
Usando (2.54) para T(s) tem-se:
1 E(s) R (s) 1 C SI A B
(2.59)
Aplicando o teorema do valor final resulta:
1 lim sE(s) lim sR (s) 1 C SI A B s0
s 0
(2.60)
Exemplo: Calcular o erro de estado estacionário, do sistema abaixo, para entradas rampa e degrau unitários. 5 1 A 0 - 2 20 - 10
0 1 ; 1
0 B 0 ; 1
C 1 1
0
Substituindo em (2.60) obtém-se: s3 6s 2 12s 16 e() lim sR (s) s3 6s2 13s 20 s0
Para um degrau unitário R(s)=1/s, e e()=4/5 e para uma rampa unitária R(s)=1/s2, e e()=.
UNIDADE II
30 EXERCÍCIOS DA UNIDADE II
2.1 - Um sistema possui a seguinte função de transferência: 10(s 4)(s 6) G (s ) (s 1)(s 7)(s 8)(s 10) Escrever por inspeção, a saída c(t), em termos genérico se a entrada for um degrau unitário. 50 2.2 - Um sistema possui uma FT G(s) . Obter a constante de tempo T c, o s 50 tempo de assentamento Ts e o tempo de subida, Tr.
2.3 - Escrever, por inspeção, a forma geral da resposta ao degrau para cada uma das FT. 400 a) G (s) 2 s 12s 400 900 b) G (s) 2 s 90ss 900 225 c) G (s) 2 s 305s 225 625 d) G (s) 2 s 625
2.4 - Obter , n , Ts, Tp , Tr e %UP de um sistema cuja função de transferência é: 361 G (s ) 2 s 16s 361
2.5 - Determinar a validade de uma aproximação de segunda ordem, para cada uma das FT abaixo:
700 a) G(s) (s 15)(s 2 4s 100) 360 b) G(s) (s 4)(s2 2s 90) 2.6 - Determinar a validade de uma aproximação de Segunda ordem da resposta ao degrau para as seguintes FT: 185,7(s 7) a) G (s) (s 6,5)(s 10)(s 20) 197,14(s 7) c) G(s) (s 6,9)(s 10)(s 20)
UNIDADE II
31
2.7 - Usar o simulink do MATLAB para reproduzir a Figura abaixo:
2.8 - Para o sistema representado no espaço de estados abaixo: a) Determine y(t) usando as técnicas de espaço de estados e da transformada de Laplace; b) Obtenha os autovalores e os pólos do sistema. 2.9 - Para o sistema representado no espaço de estados abaixo: 0 x -2
2 0 x e -2t ; - 5 1
y 2
1 x e
1 x(0) 2
a) Calcule a matriz de transição de estados; b) Calcule o vetor de estado usando a integral de convolução; c) Obtenha a saída y(t). 2.10 - Considere o sistema mostrado na Figura abaixo a). O coeficiente de amortecimento do sistema é o,158 e a frequência natural não amortecida é 3,16 rad/s. Para melhorar a estabilidade relativa, utilizou-se uma realimentação tacométrica, como mostra a Figura b). Determine o valor de k, de modo que o coeficiente de amortecimento seja 0,5. Desenhe a curvas de resposta ao degrau unitário, do sistema da Figura a) e do sistema da Figura b). Determine também as curvas de erro versus tempo para a resposta a uma rampa unitária de ambos os sistemas.
UNIDADE II
32
2.11 - Utilizando o MATLAB, obtenha a resposta ao degrau unitário, à rampa unitária e ao impulso unitário do seguinte sistema: R(s) 10 2 C(s) s 2s 10 onde R(s) e C(s) são as transformada de Laplace da entrada r(t) e da saída c(t), respectivamente. 2.12 - Determine o intervalo de valores de k para a estabilidade do sistema com realimentação unitária, cuja FT em malha aberta é: k G (s ) s(s 1)(s 2) 2.13 - Considere o sistema de controle de um satélite mostrado na Figura a). A saída do sistema apresenta oscilações continuadas não desejáveis. Este sistema pode ser estabilizado pelo uso de realimentação tacométrica, como mostra a Figura b). Se k/j=4, que valor de kh resultará em coeficiente de amortecimento igual a 0,6?
2.14 - Considere um sistema de controle com retroação unitária, cuja FT a malha fechada é:
C (s ) ks b 2 R (s ) s as b Determine a FT de malha aberta G(s). Mostre que o erro estacionário na resposta à rampa unitária é dada por:
UNIDADE II
33
1 a k e() kv b 2.15 - Considere um sistema de controle com realimentação unitária cuja FT de malha aberta é:
k G (s) s ( js B) Discuta os efeitos que as variações de k e B produzem sobre o erro estacionário da resposta à entrada em rampa unitária. Esboce curvas típicas de resposta à rampa unitária para valores pequenos, médios e elevados de k, supondo que B seja constante. 2.16 - Determinar o erro de estado estacionário, a uma entrada em degrau, para o sistema da Figura abaixo. Repita o problema para uma entrada em rampa unitária. .
2.17 - Determinar a sensibilidade do erro de estado estacionário à variações de k no sistema da Figura abaixo.
2.18 - Determinar o erro de estado estacionário a uma entrada em degrau para o sistema abaixo:
0 A -3
1 ; - 6
0 B 1
e
C 1 1
2.19 - Para o sistema da Figura abaixo, qual o erro de estacionado esperado para uma entrada de 15u(t)?
UNIDADE II
34
2.20 - Um sistema com retroação unitária possui a seguinte FT no percurso direto:
10(s 20)(s 30) G(s ) s (s 25)(s 35) a) Determine o erro de estado estacionário para as seguintes entradas: 15u(t), 15tu(t) e 15t2u(t). b) Repetir para:
10(s 20)(s 30) G (s) 2 s (s 25)(s 35)(s 50) PROGRAMAS MATLAB 01. Resposta ao degrau de FT clf numt1=[24.542]; dent1=[1 4 24.542]; 'T1(s)' T1=tf(numt1,dent1) step(T1)
% Apaga o gráfico existente. % Define o numerador de T1. % Define o denominador de T1. % Exibe título. % Cria e mostra T1(s). % Executa uma demonstração de % gráfico de resposta a um degrau. title('Execução de Teste of T1(s)') % Adiciona legenda. pause 'Execução completa' % Exibe título. [y1,t1]=step(T1); % Executa a resposta de T1 a um % degrau e coleta pontos. numt2=[245.42]; p1=[1 10]; p2=[1 4 24.542];
% Define o numerador de T2. % Define (s+10) no denominador de T2. % Define (s^2+4s+24.542) no % denominador de T2. dent2=conv(p1,p2); % Multiplica (s+10)(s^2+4s+24.542) pelo % denominador de T2. 'T2(s)' % Exibe título. T2=tf(numt2,dent2) % Cria e mostra T2. [y2,t2]=step(T2); % Executa a resposta de T2 a um % degrau e coleta pontos. numt3=[73.626]; % Define o numerador de T3. p3=[1 3]; % Define (s+3) no denominador de T3. dent3=conv(p3,p2); % Multiplica (s+3)(s^2+4s+24.542) pelo % denominador de T3. 'T3(s)' % Exibe título. T3=tf(numt3,dent3) % Cria e mostra T3. [y3,t3]=step(T3); % Executa a resposta de T3 a um % degrau e coleta % pontos. clf % Apaga o gráfico existente. plot(t1,y1,t2,y2,t3,y3) % Plota os pontos coletados com os %três gráficos em uma única figura.
UNIDADE II
35
title('Resposta ao degrau de T1(s),T2(s),e T3(s)') % Adiciona legenda do gráfico. xlabel('Tempo(s)') % Nomeia o eixo dos x como eixo dos tempos. ylabel('Resposta Normalizada') % Nomeia o eixo dos y como % eixo da resposta. text(0.7,0.7,'c3(t)') % Identifica a curva da % resposta ao degrau de T1. text(0.7,1.1,'c2(t)') % Identifica a curva da % resposta ao degrau de T2. text(0.5,1.3,'c1(t)') % Identifica a curva da % resposta ao degrau de T3. pause step(T1,T2,T3) % Usa método alternativo para plotar % as respostas ao degrau. title('Step Responses of T1(s),T2(s),and T3(s)')% Adiciona % legenda do gráfico. Pause 02. Solução no domínio do tempo syms s t tau
% Constrói objetos simbólicos para % a variável de freqüência 's', 't', e 'tau'. A=[0 1;-8 -6] % Cria a matriz A. B=[0;1] % Cria o vetor B. X0=[1;0] % Cria o vetor de condição inicial,X(0). U=1 % Cria u(t). I=[1 0;0 1]; % Cria a matriz identidade. E=((s*I-A)^-1) % Obtém a transformada de Laplace da % matriz de transição de estados, (sI-A)^-1. Fi11=ilaplace(E(1,1)); % Obtém a transformada de % Laplace inversa Fi12=ilaplace(E(1,2)); % de cada elemento Fi21=ilaplace(E(2,1)); % de (sI-A)^-1 Fi22=ilaplace(E(2,2)); % para determinar a matriz de % transição de estados. Fi=[Fi11 Fi12;Fi21 Fi22]; % Forma a matriz de transição de % estados, Fi(t). pretty(Fi) % Apresenta a matriz de transição de % estados, Fi(t), na forma "bonita". Fitmtau=subs(Fi,t,t-tau); % Forma Fi(t-tau). pretty(Fitmtau) % Apresenta Fi(t-tau) na forma "bonita". x=Fi*X0+int(Fitmtau*B*1,tau,0,t); % Calcula x(t). x=simple(x); % Reune os termos semelhantes. x=simplify(x); % Simplifica x(t). pretty(x) % Apresenta x(t) na forma "bonita". Pause 03. Superpõe uma grade reticulada ao gráfico da resposta. clf A=[0 1 0;0 0 1;-24 -26 -9];
% Apaga gráfico existente. % Gera a matriz A.
UNIDADE II
B=[0;0;1]; C=[2 7 1]; D=0; T=ss(A,B,C,D) t=0:0.1:10; grid on step(T,t)
36 % Gera o vetor B. % Gera o vetor C. % Gera D. % Gera objeto LIT , T, no espaço % de estados e mostra o resultado. % Define a faixa de valores % de tempo para o gráfico. % Ativa a colocação de grade no desenho. % Plota a resposta ao degrau para uma dada % faixa de valores de tempo.
Pause 04. Critério de estabilidade de Routh FT:
C 10 (verificar a estabilidade) R s5 2s 4 3s 3 6s 2 5s 3
% -det([si() si();sj() sj()])/sj()
% Gabarito para ser % usado em cada célula. syms e % Constrói um objeto simbólico para % epsilon. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s5=[1 3 5 0 0] % Cria a linha s^5 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s4=[2 6 3 0 0] % Cria a linha s^4 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s5(1) s5(2);s4(1) s4(2)])/s4(1)==0 s3=[e... -det([s5(1) s5(3);s4(1) s4(3)])/s4(1) 0 0];% Cria a linha % s^3 da tabela de Routh % se o primeiro elemento for 0. else s3=[-det([s5(1) s5(2);s4(1) s4(2)])/s4(1)... -det([s5(1) s5(3);s4(1) s4(3)])/s4(1) 0 0];% Cria a linha s^3 da tabela de Routh % se o primeiro elemento não for 0. end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s4(1) s4(2);s3(1) s3(2)])/s3(1)==0 s2=[e ... -det([s4(1) s4(3);s3(1) s3(3)])/s3(1) 0 0];% Cria a linha % s^2 da tabela de Routh % se o primeiro elemento for 0. else s2=[-det([s4(1) s4(2);s3(1) s3(2)])/s3(1) ... -det([s4(1) s4(3);s3(1) s3(3)])/s3(1) 0 0];% Cria a linha % s^2 da tabela de Routh % se o primeiro elemento não for 0. end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if -det([s3(1) s3(2);s2(1) s2(2)])/s2(1)==0
UNIDADE II
37
s1=[e ... -det([s3(1) s3(3);s2(1) s2(3)])/s2(1) 0 0];% Cria a linha % s^1 da tabela de Routh % se o primeiro elemento for 0. else s1=[-det([s3(1) s3(2);s2(1) s2(2)])/s2(1) ... -det([s3(1) s3(3);s2(1) s2(3)])/s2(1) 0 0];% Cria a linha % s^1 da tabela de Routh % se o primeiro elemento não for 0 end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s0=[-det([s2(1) s2(2);s1(1) s1(2)])/s1(1) ... -det([s2(1) s2(3);s1(1) s1(3)])/s1(1) 0 0];% Cria a linha % s^0 da tabela de Routh. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s3=simplify(s3); % Simplifica os termos da linha s^3. pretty(s3) % Forma "bonita" da linha s^3. s2=simplify(s2); % Simplifica os termos da linha s^2. pretty(s2) % Forma "bonita" da linha s^2. s1=simplify(s1); % Simplifica os termos da linha s^1. pretty(s1) % Forma "bonita" da linha s^1. s0=simplify(s0); % Simplifica os termos da linha s^0. pretty(s0) % Forma "bonita" da linha s^0. Pause 05. Projeto de estabilidade via Routh k FT: G (calcular os valores de k para o sistema permanecer estável) s(s 7)(s 11)
K=[1:1:2000];
% Define a faixa de valores K de 1 a 2000 em % incrementos de 1. for n=1:length(K); % Definição do número de % repetições do LAÇO DO igual % ao número de valores de K a % serem testados. dent=[1 18 77 K(n)]; % Define o denominador de T(s) para % o enésimo valor de K. poles=roots(dent); % Obtém os pólos para o enésimo valor % de K. r=real(poles); % Forma um vetor contendo as partes % reais dos pólos para K(n). if max(r)>=0, % Testa se a parte real dos pólos obtidos % com o enésimo valor de K é > ou = 0. poles % Mostra primeiro os pólos % com parte real > ou = 0. K=K(n) % Mostra o valor correspondente de K. break % Interrompe o laço se não forem encontrados % pólos no semiplano da direita end % Fim de if. end % Fim do for. Pause
UNIDADE II
38
06. Erro de estado estacionário por meio da constante de erro estático Função de transferência 1 numg=500*poly([-2 -5 -6]); % Define o numerador de G(s). deng=poly([0 -8 -10 -12]); % Define o denominador de G(s). G=tf(numg,deng); % Forma G(s) 'Verificar a Estabilidade' % Exibe título. T=feedback(G,1); % Forma T(s). polos=pole(T) % Mostra os pólos a malha fechada. 'Entrada em Degrau' % Exibe título. Kp=dcgain(G) % Calcula Kp=numg/deng para s=0. ess=1/(1+Kp) % Calcula o erro de estado estacionário % para uma entrada em degrau. Função de transferência 2 'Entrada em Rampa' % Exibe título. numsg=conv([1 0],numg); % Define o numerador de sG(s). densg=poly([0 -8 -10 -12]); % Define o denominador de sG(s). sG=tf(numsg,densg); % Cria sG(s). sG=minreal(sG); % Cancela os termos comuns ao numerador(numsg) % e ao denominador(densg). Kv=dcgain(sG) % Calcula Kv=sG(s) for s=0. ess=1/Kv % Calcula o erro de estado estacionário % uma entrada em rampa. Função de transferência 3 'Entrada em Parábola' % Exibe título. nums2g=conv([1 0 0],numg); % Define o numerador de s^2G(s). dens2g=poly([-8 -10 -12]); % Define o denominador de s^2G(s). s2G=tf(nums2g,dens2g); % Cria s^2G(s) s2G=minreal(s2G); % Cancela os termos comuns ao % numerador(nums2g) e % ao denominador(dens2g). Ka=dcgain(s2G) % Calcula Ka=s^2G(s) para s=0. ess=1/Ka % Calcula o erro de estado estacionário % para uma entrada em parábola. sG=minreal(sG); % Cancela termos comuns ao numerador(numsg) % e ao denominador(densg). Kv=dcgain(sG) % Calcula Kv=sG(s) para s=0. ess=1/Kv % Calcula o erro de estado estacionário para % uma entrada em rampa. 'Entrada em Parábola' % Exibe título. nums2g=conv([1 0 0],numg); % Define o numerador de s^2G(s). dens2g=poly([-8 -10 -12]); % Define o denominador de s^2G(s). s2G=tf(nums2g,dens2g); % Cria s^2G(s) s2G=minreal(s2G); % Cancela termos comuns % ao numerador(nums2g) e % ao denominador(dens2g).
UNIDADE II
Ka=dcgain(s2G) ess=1/Ka
39 % Calcula Ka=s^2G(s) para s=0. % Calcula o erro de estado estacionário para % uma entrada em parábola.
Pause 07. Projeto de ganho para atender a especificação de erro de estado estacionário numgdK=[1 5]; % Define o numerador de G(s)/K. dengdK=poly([0 -6 -7 -8]); % Define o denominador de G(s)/K. GdK=tf(numgdK,dengdK); % Cria G(s)/K numgkv=conv([1 0],numgdK); % Define o numerador de sG(s)/K. dengkv=dengdK; % Define o denominador de sG(s)/K. GKv=tf(numgkv,dengkv); % Cria sG(s)/K. GKv=minreal(GKv); % Cancela termos comuns ao numerador e % ao denominador de sG(s)/K. KvdK=dcgain(GKv) % Calcula (Kv/K)=(numgkv/dengkv) para % s=0. ess=0.1 % Define o erro de estado estacionário. K=1/(ess*KvdK) % Calcula o valor de K. 'Verifica a Estabilidade' % Exibe rótulo. T=feedback(K*GdK,1); % Forma T(s). poles=pole(T) % Mostra os pólos a malha fechada. Pause
More Documents from "Rhaian Barros"

Notas_de_aula_da_unidade_i.pdf
January 2021 1

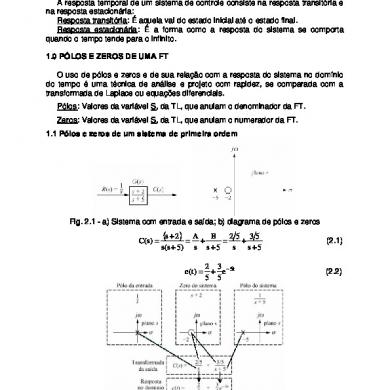
Notas_de_aula_da_unidade_ii.pdf
January 2021 1
