Unidade Iv 44 Páginas Análise No Domínio Da Frequência
This document was uploaded by user and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this DMCA report form. Report DMCA
Overview
Download & View Unidade Iv 44 Páginas Análise No Domínio Da Frequência as PDF for free.
More details
- Words: 8,907
- Pages: 45
Loading documents preview...
UNIDADE IV
44 páginas
ANÁLISE NO DOMÍNIO DA FREQUÊNCIA A resposta em freqüência produz um novo enfoque vantajoso sobre o LR nas seguintes situações: 1. quando se modela FT a partir de dados físicos; 2. quando se projeta compensadores de avanço de fase para atender o erro de estado estacionário e a resposta transitória requerida; 3. ao se determinar a estabilidade dos sistemas não-lineares; 1.0
CONCEITO DE RESPOSTA EM FREQUÊNCIA
Entradas senoidais aplicadas à sistemas lineares geram respostas senoidais de mesma freqüência, diferenciando apenas em amplitude e fase. A magnitude da resposta em freqüência é a relação entre as magnitudes de entrada e de saída. Ambas são funções da freqüência e se aplicam apenas à resposta de estado estacionário. Considere o sistema mostrado na Figura (4.1).
a)
b)
c) Fig. 4.1 - a) sistema; b) função de transferência; c) formas de onda de entrada e de saída A senóide de estado estacionário de saída é:
UNIDADE IV
2
M o ()o () M e ()M()e () ()
(4.1)
A função do sistema á dada por:
M o () e () o () e () M e () 1.1 Expressões Analíticas de Resposta em Freqüência M()
(4.2)
A Figura (4.2) mostra um sistema G(s) com a transformada de Laplace de uma senóide genérica na entrada.
r ( t ) A cos(t ) Bsen(t ) A2 B2 cos[t tg1 ( B / A)]
(4.3)
Fig. 4.2 - Sistema com entrada senoidal A resposta C(s) é dada por:
C(s)
As B G (s ) s2 2
(4.4)
Separando a solução forçada da solução transitória, executando uma expansão em frações parciais: As B k1 k C(s) G (s ) 2 termos das FP de G(s) (4.5) (s j)(s j) s j s j Expansão de G(s) em frações parciais.
G(s)
N(s) N(s) D(s) (s p1 )(s p2 )...(s p m ) k1 k k 2 ... m s p1 s p2 s pm
(4.6)
Se a ordem de N(s) for inferior a ordem de D(s), para calcular k m, multiplica-se (4.6) por (s+pm). (s p m )G (s )
( s p m ) N (s ) (s p1 )(s p2 )...(s p m )
(s p m )
k1 k2 (s p m ) ... (s p1) (s p 2 )
(s p m )
k m 1 km (s p m 1 )
(4.7)
UNIDADE IV
3
Fazendo s pm , em (4.7), todos os termos da direita tenderão a zero, exceto o termo km.
(s p m ) N ( s ) km (s p1 )(s p2 )....(s p m ) s p
logo
(4.8)
m
No caso de (4.5) tem-se: k1
As B 1 1 G (s ) A jB G( j) M e e je M G e jG (s j) 2 s - j 2
M e M G j( e G ) e 2 As B 1 1 k2 G (s ) A jB G( j) M e e je M G e jG (s j) 2 s j 2
M e M G j( e G ) e k1* 2
(4.9)
(4.10)
*
onde k 1 é o conjugado complexo de k 1 .
M G G( j)
e
G ângulo de G(j)
(4.11)
A saída senoidal de estado estacionário é:
k1 k2 Css s j s j
M e M G j( e G ) M e M G j( e G ) e e 2 2 s j s j
(4.12)
Aplicando a transformada de Laplace inversa tem-se:
e j( t e G ) e j( t e G ) M e M G cos(t e G ) c( t ) M e M G 2
(4.13)
que pode ser representada na forma de fasor por:
Mss ( Mee )( MGG )
(4.14)
Com base em (4.11) M G G é a função resposta de freqüência de um sistema cuja FT é G(s), onde: G( j) G(s)s j
(4.15)
UNIDADE IV
4
1.2 Gráfico da resposta em freqüência Pode ser plotada de várias formas; duas delas são: 1. Através de gráficos separados de magnitude e de fase, em função da freqüência (diagramas de Bode); 2. Por meio de um gráfico polar onde o comprimento do fasor é a magnitude e o ângulo é a fase (diagrama de Nyquist). 2.0 DIAGRAMA DE BODE Para o caso 1), a curva de magnitude pode ser traçada em decibéis (dB), onde dB=20logM. Exemplo: Determinar a expressão analítica de magnitude e de fase da resposta em freqüência do seguinte sistema:
G (s )
1 s2
Fazendo s j na FT acima tem-se:
G( j)
1 2 j 2 j 2 4
cujo módulo é dado por:
G( j) M()
1 (2 4)
onde o módulo em dB e a fase são:
1 20 log M() 20 log (2 4)
e
() tg1 2
Fig. 4.3 - Diagrama de módulo e de fase de G(s)
UNIDADE IV
5
2.1 Aproximações assíntotas: Gráficos de Bode As curvas logarítmicas de módulo e de fase são chamadas de gráfico de Bode. O gráfico de Bode pode ser simplificado por uma seqüência de linhas retas. Considere a seguinte FT:
G (s )
k(s z1 )(s z 2 )...(s z k ) s m (s p 1 )(s p2 )...(s p n )
G( j)
(4.16)
k s z1 s z 2 ... s z k s m s p1 s p2 ... s p n
(4.17) s j
20 log G( j) 20 log k 20 log s z1 20 log s z 2 ... 20 log s z k 20 log sm 20 log s p1 20 log s p2 .... 20 log pn s jw
(4.18)
Gráfico do módulo e de fase de Bode para G(s)=(s+a)
G(s) (s a ) G( j) ( j a ) a j 1 a
(4.19) (4.20)
Nas baixas freqüências, quando 0 , tem-se G( j) a e a resposta em freqüência em dB é 20 log M 20 log( a ) . Nas altas freqüências, onde a tem-se: j G( j) a a 90o 90o a a
(4.21)
e a resposta em freqüência em dB é: 20 log M 20 log( )
Fig. 4.4 - Diagrama de módulo de Bode assintótica para G(s)=s+a
(4.22)
UNIDADE IV
6
Na freqüência de quebra a , a Equação (4.20) mostra que a fase é 45 º, ou seja: (4.23) G( j) a j 1 j1 1 a e nas baixas freqüências, Equação (4.20), a fase é zero. G( j) a
(4.24)
e nas altas freqüências, Equação (4.20), a fase é 90º. j G( j) a a 90o a a
Fig. 4.5 - Diagrama de fase de Bode assintótica para G(s)=s+a Tab. 4.1 - Resposta em freqüência assintótica e real normalizada
(4.25)
UNIDADE IV
7
Fig. 4.6 - Diagrama de Bode em módulo assintótica e real normalizada
Fig. 4.7 - Diagrama de Bode em fase assintótica e real normalizada Diagrama de Bode para G(s)=1/(s+a)
G (s )
1 sa
(4.26)
Esta função tem um a assíntota de baixas freqüências dada por:
1 G(s) 0o a e para altas freqüências:
(4.27)
UNIDADE IV
8
1 1 90o j
(4.28)
20 log M 20 log( )
(4.29)
G (s ) Em dB tem-se:
Fig. 4.8 - Diagrama de Bode em módulo assintótica normalizada
Fig. 4.9 - Diagrama de Bode em fase assintótica normalizada Diagrama de Bode para G(s)=s
a)
b) Fig. 4.10 - Diagrama de Bode para G(s)=s; a) módulo; b) fase
UNIDADE IV
9
Diagrama de Bode para G(s)=1/s
a)
b)
Fig. 4.11 - Diagrama de Bode para G(s)=1/s; a) módulo; b) fase Exemplo: Esboce o gráfico de Bode para o sistema G(s)
k(s 3) . s(s 1)((s 2)
A equação acima pode ser escrita da seguinte forma:
3 s k 1 2 3 G (s ) s s(s 1) 1 2
a)
b) Fig. 4.12 - Diagrama de módulo de Bode; a) funções separadas; b) resultante
UNIDADE IV
10
a)
b) Fig. 4.13 - Diagrama de fase de Bode; a) funções separadas; b) resultante Diagrama de Bode para fatores de segunda ordem O polinômio de segunda ordem é da forma:
s2 G(s) s2 2 ns 2n 2n 2 2 ns 2n n Nas baixas freqüências, (4.30) se transforma em:
G(s) 2n0o
(4.30)
(4.31)
e o módulo em dB é:
20 log M 20 log G(s) 20 log 2n
(4.32)
Nas altas freqüências tem-se: G(s) s2 2 2180o
(4.33)
e o módulo em dB é:
20 log M 20 log G(s) 20 log 2 40 log
(4.34)
UNIDADE IV
11
Fig. 4.14 - Diagrama de módulo de Bode Nas baixas freqüências, a fase é 0o e nas altas é 180o. Para determinar a fase na freqüência natural faz-se s j , ou seja:
G( j) s2 2 ns 2n
s j
2 n
2 j2 n
(4.35)
Fazendo n tem-se: G( j) j2 2n
(4.36)
De acordo com (4.36) a fase é +90º.
Fig. 4.15 - Diagrama de fase de Bode Como a função de segunda ordem depende do fator de amortecimento , o erro das assíntotas é maior que no sistema de primeira ordem. Com base na Equação (4.35) tem-se: M
2 n
2 (2 n )2
e
tg1
2 n 2n 2
(4.37)
(4.38)
UNIDADE IV
12
a)
b) Fig. 4.16 - Diagrama de Bode para a Equação (4.37); a) módulo; b) fase O polinômio de segunda ordem é da forma: G (s )
1 s 2 ns 2n 2
O raciocínio é similar ao caso anterior.
(4.39)
UNIDADE IV
13
a)
b) Fig. 4.17 - Diagrama de Bode para a Equação (4.39); a) módulo; b) fase 2.2 Estabilidade, margem de ganho e margem de fase através do diagrama de Bode A margem de fase e a margem de ganho informam quão estável o sistema é. Sistemas com margem de ganho e de fase maiores podem suporta maiores mudanças nos parâmetros dos sistemas antes de se tornarem instáveis. As margem de ganho e de fase podem ser qualitativamente relacionadas com o LR, no sentido de que, sistemas cujos pólos estão mais distantes do eixo imaginário, apresentam um maior grau de estabilidade. Margem de ganho, GM. É a mudança no valor do ganho, em dB, em malha aberta, no ponto com fase de 180o, necessário para tornar o sistema instável em malha fechada.
UNIDADE IV
14
Margem de fase, M. É a mudança no valor da fase em malha aberta, no ponto com ganho unitário, necessário para tornar o sistema instável em malha fechada. Margem de ganho e de fase a partir do diagrama de Bode A Figura (4.18) mostra a margem de ganho e de fase no diagrama de Bode.
Fig. 4.18 - Margens de ganho e de fase onde M é a freqüência de margem de fase e GM é a freqüência de margem de ganho. Exemplo: Determinar a faixa de valores de k para o qual o sistema com retroação unitária abaixo é estável.
G (s )
k (s 2)(s 4)(s 5)
O sistema em malha fechada será estável, se a resposta em freqüência for menor que a unidade, quando a fase for 180º. Para traçar o diagrama de Bode de módulo e fase é necessário conhecer o valor de k. O digrama de Bode da Figura abaixo foi traçado para um valor de k=40. Na freqüência de 7 rad/s, onde a fase é -180o, a magnitude é -20 dB. Por conseguinte, é possível um aumento no ganho de 20 dB (que corresponde a um ganho de 10), para o sistema se tornar instável. Portanto, o ganho necessário é 10x40=400. Logo 0
UNIDADE IV
15
A margem de fase é determinada no ponto onde o módulo cai de -13,98dB, o que corresponde a -165o-(-180o)=15o na freqüência de 5,5 rad/s
2.3 Relação entre resposta transitória e resposta em freqüência em MF Considere o sistema de controle, com retroação, de segunda ordem, dado pela seguinte FT em malha fechada:
T (s )
C(s) 2n 2 R (s) s 2 ns 2n
(4.40)
Fig. 4.19 - Sistema de segunda ordem em MF A magnitude de resposta em freqüência em malha fechada é:
M T( j)
2n
2n
4
2 2
(4.41) 2
2n 2
UNIDADE IV
16
Fig. 4.20 - Gráfico logarítmico de módulo dado por (4.41) Elevando (4.41) ao quadrado, derivando com relação a e fazendo a derivada igual a zero tem-se: 2
MP
1
(4.42)
2 1 2
e
P n 1 2 2
(4.43)
Uma outra relação entre a resposta em freqüência e a resposta no domínio do tempo é a banda passante, BW , cujo valor corresponde ao ponto onde a curva de módulo cai 3 dB com relação à freqüência zero (Fig. 4.20). Neste caso, fazendo M=0,707 em (4.41), resulta em:
BM n 1 2 2 4 4 4 2 2
(4.44)
Para relacionar BW com o tempo de assentamento, substitui-se n 4 Ts em (4.44) que resulta em: BM
1 2
4 Ts
2
4 4 4 2 2
(4.45)
De modo semelhante, como n TP 1 2 :
BM
TP 1
1 2 2
2
4 4 4 2 2
2.4 Fator de amortecimento a partir da margem de fase Considere um sistema com retroação unitária cuja FT em malha aberta é:
(4.46)
UNIDADE IV
17
G (s )
2n s(s 2 n )
(4.47)
Para calcular a margem de fase deve-se fazer G( j) 1 , ou seja:
2n 2 j2 n
1
(4.48)
A freqüência 1 que satisfaz (4.48) é:
1 n 2 2 1 4 4 O ângulo de fase nesta freqüência é:
G( j) 90 tg1
90 tg1
(4.49)
1 2 n
2 2 4 4 1
2 A diferença entre o ângulo dado por (4.50) e -180o é a margem de fase: M 90 tg1
(4.50)
2 2 1 4 4 2
2
tg1
2 1 4 2
(4.51) 4
Fig. 4.21 - Gráfico de margem de fase dado por (4.51) De acordo com (4.43) não existe freqüência de pico se 0,707 . Portanto, a partir da Figura (4.21) é necessário uma margem de fase M 65,52 , a partir da resposta em malha aberta para assegurar que não existirá pico na resposta em malha fechada. o
UNIDADE IV
18
2.5 Erro de estado estacionário a partir da resposta em freqüência Os valores de kp, kv e ka para sistema s do tipo 0, tipo1 e tipo 2, respectivamente podem ser obtidos a partir do diagrama de Bode. Constante de posição kp Considere o seguinte sistema tipo 0 n
(s z i )
G(s) k im1 (s p i )
(4.52)
i 1
Cujo valor inicial é: n
zi
20 log M 20 log k im1 pi
(4.53)
i 1
Mas para um sistema tipo 0: n
zi
k p k im1 pi
(4.54)
i 1
Que é o mesmo valor do eixo nas baixas freqüências.
Fig. 4.22 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 0 Constante de velocidade Considere um sistema dado do tipo1 dado por: n
G (s ) k
(s z i )
i 1 m
s (s p i ) i 1
O diagrama de Bode começa em:
(4.55)
UNIDADE IV
19 n
zi
i 1 m
20 log M 20 log k
(4.56)
o pi i 1
A inclinação -20 dB/década pode ser pensada como se originando a partir de uma função: n
zi
G ' (s ) k
i 1 m
(4.57)
s pi
i 1 G'(s) cruza o eixo de freqüência quando: n
zi
k im1 pi
(4.58)
i 1
Mas, para o sistema original (4.56) : n
zi
k v k im1 pi
(4.59)
i 1
Que é a interseção com o eixo de freqüências como mostra a Figura (4.23).
Fig. 4.23 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 1 Constante de aceleração Para determinar ka, para um sistema tipo 2, considere o seguinte sistema: n
G (s ) k
(s z i )
i 1 m 2
(4.60)
s (s p i ) i 1
O diagrama de Bode se inicia em: n
20 log M 20 log k
zi
i 1 m 2o pi i 1
(4.61)
UNIDADE IV
20
A inclinação de -40 dB/década pode ser vista como originária de uma função: n
G ' (s ) k
zi
i 1 m 2
(4.62)
s pi i 1
G'(s) cruza o eixo de freqüência quando: n
zi
k im1 pi
(4.63)
i 1
Mas, para o sistema original (4.60) tem-se: n
zi
k a k im1 pi
(4.64)
i 1
Portanto, a inclinação inicial cruza o eixo de freqüência em
ka .
Fig. 4.24 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 2 Exemplo: Para cada diagrama da Figura abaixo. Determine o tipo de sistema e a constante de erro estático apropriada. Sistema tipo 0
Uma vez que a inclinação inicial á zero, o valor de kp é dado pela assíntota de baixa freqüência.
UNIDADE IV
21
20 log k p 25 k p 17,78 Sistema tipo 1
Uma vez que a inclinação é -20dB/déc., o valor de kv é dado pelo valor da freqüência que cruza o diagrama em 0,55 . Sistema tipo 2
Uma vez que a inclinação inicial é -40dB/década, o valor da freqüência é:
k a k a 33 9 2.6 Resposta transitória através do ajuste de ganho Observando-se a Figura (4.25) pode-se vê que para se obter uma margem de fase CD é necessário elevar o ganho de AB na curva de módulo. Portanto, um simples ajuste de ganho muda a margem de fase e a ultrapassagem percentual. Procedimento de projeto 1. Traçar o diagrama de Bode de módulo e de fase para um ganho conveniente; 2. Usando (2.21) e (4.51) determinar a margem de fase requerida a partir da ultrapassagem percentual; 3. Determinar a freqüência M no diagrama de fase de Bode que leva à fase desejada; 4. Mudar o ganho do valor AB para forçar a curva de módulo cruzar 0 dB na freqüência M .
UNIDADE IV
22
Fig. 4.25 - Diagrama de módulo e de fase de Bode Exemplo: Para o sistema da Figura abaixo, determinar o valor do ganho do préamplificador, k, para que a resposta transitória a uma entrada em degrau apresente uma ultrapassagem de 9,5%.
Sistema de controle de posição 1. Escolher k=3,6 para iniciar o diagrama de módulo em 0 dB para =0,1 rad/s, como mostra a Figura abaixo. 2. Usando a Equação (2.21), uma ultrapassagem de 9,5% implica 0,6 , para os pólos em malha fechada dominantes. 3. A Equação (4.51) leva a uma margem de fase de 59,2 º, para 0,6. 4. Uma margem de fase de 59,2o leva a uma fase de -120,8o para uma freqüência de 14,8 rad/s. 5. Na freqüência de 14,8 rad/s, o ganho é -44,8 dB. Como o gráfico de módulo foi traçado para k=3,6, é necessário um ganho de 44,2 dB, ou seja, k=3,6x162,2=583,9 para obter a margem de fase requerida. A FT de malha aberta com o ganho ajustado é:
G (s )
583.900 s(s 36)(s 100)
UNIDADE IV
23
Diagrama de Bode de módulo e de fase Características do sistema compensado
3.0 ANÁLISE PELO DIAGRAMA DE NYQUIST O critério de Nyquist relaciona a estabilidade de um sistema à malha fechada à resposta de freqüência e a localização dos pólos a malha aberta. O conhecimento da resposta de freqüência do sistema à malha aberta conduz à informação sobre a estabilidade do sistema a malha fechada. Este conceito é semelhante ao do lugar das raízes onde se começa com as informações sobre os pólos e os zeros de malha aberta. 3.1 Dedução do diagrama de Nyquist Considere o diagrama de blocos da Figura (4.26). O critério de Nyquist pode informar quantos pólos a malha fechada estão no semiplano direito.
UNIDADE IV
24
Fig. 4.26 – Sistema de controle a malha fechada
G (s )
NG DG
(4.65)
H (s )
NH DH
(4.66)
G ( s ) H (s ) 1 G(s) H(s) 1 T(s)
NG N H DG D H
(4.67)
N G N H DG D H N G N H DG D H DG D H
(4.68)
N G DG G(s) 1 G (s ) H (s ) D G D H N G N H
(4.69)
Com base nas Eqs. (4.67, 468 e 469) conclui-se que: 1. Os pólos de 1+G(s)H(s) são os mesmos que os pólos de G(s)H(s); 2. Os zeros de 1+G(s)H(s) são os mesmos que os pólos de T(s); 2.2 Mapeamento A substituição de um número complexo s em uma função F(s) resultará em outro número complexo. Este processo é chamado de mapeamento. Por exemplo: A substituição do número complexo s = 4+j3 na função (s 2+2s+1), gera o número complexo 16+j30. Neste caso, diz-se que o ponto 4+3j é mapeado no ponto 16+j30 através da função (s2+2s+1). Para compreender o conceito de mapear contorno pode-se considerar a coleção de pontos mostrada na Figura (4.27) como contorno da A e que cada ponto do contorno seja mapeado no contorno B através da seguinte Expressão: F(s)
(s z1 )(s z 2 )... (s p1 )(s p 2 )...
Fig. 4.27 – Mapeamento do contorno A no contorno B.
(4.70)
UNIDADE IV
25
O ponto Q no contorno A é mapeado no ponto Q! no contorno B através da função F(s). A Figura (4.28) mostra exemplos de mapeamento de um contorno através de algumas F(s) simples. O número resultante R é calcula a partir de números complexos representados por V. 1. Se o mapeamento for feito no sentido horário como mostra a Figura (4.27a), o contorno B será mapeado, também, no sentido horário se o sistema possuir unicamente zeros e no sentido anti-horário se possuir apenas pólos (Figura 4.3b).
Fig. 4.28a – Mapeamento unicamente com zeros.
Fig. 4.28b – Mapeamento unicamente com pólos. 2. Se o pólo ou zero estiver envolvido pelo contorno, o mapeamento envolverá a origem (Figuras 4.27c e d).
Fig. 4.28c – Mapeamento quando o zero é envolvido pelo contorno.
UNIDADE IV
26
Fig. 4.28d – Mapeamento quando o pólo é envolvido pelo contorno. 3. O mapeamento quando a função possui um pólo e um zero, a rotação do pólo e do zero se cancelam, e o mapeamento não envolve a origem (Figura 4.29).
Fig. 4.29 – Mapeamento quando a função possui um pólo e um zero. Supondo que F(s)=1+G(s)H(s) tenha dois zeros e três pólos, cada termo entre parênteses na Eq. (4.70) é um vetor na Figura (4.30). À medida que se desloca ao longo do contorno A na direção horária, cada vetor da Eq. (4.70) que se encontre no interior do contorno A parecerá ser submetido a uma rotação completa (360 o). Por outro lado, para pólos e zeros fora do contorno A parecerá oscilar e retornar à posição anterior, com uma variação angular líquida de 0o.
Fig. 4.30 – Representação do mapeamento por vetor. Como mostra a Figura (4.30), os pólos de 1+G(s)H(s) [Eqs. (4.69)], são também pólos de G(s)H(s) e são conhecidos. Os zeros de 1+G(s)Hs), são também os pólos de T(s) e não são conhecidos. Através da Eq. (4.71) pode-se calcular o número de rotações N no sentido antihorário do mapeamento em torno da origem.
UNIDADE IV
27
N PZ
(4.71)
onde: P é o número de pólos em malha aberta no interior do contorno; Z é o número de pólos a malha fechada no interior do contorno. Se um contorno, A, que envolve o semiplano da direita através de G(s)H(s) então, o número de pólos a malha fechada, Z, no semiplano da direita é igual ao número de pólos à malha aberta, P, que estão no semiplano da direita, menos o número de rotações no sentido anti-horário, N, em torno de –1 do mapeamento. Z PN
(4.72)
2.3 critério de Nyquist para determinar a estabilidade A Figura (4.31a) mostra um contorno, A, que não envolve os pólos a malha fechada. O contorno que é mapeado através de G(s)H(s) no diagrama de Nyquist não envolve –1. Portanto, P=0, N=0 e Z=0. Uma vez que Z é o número de pólos a malha fechada dentro do contorno, A, este sistema não tem pólos no semiplano direito e é estável. Na Figura (4.30b), embora o contorno, A, não circunscreva pólos à malha aberta gera dois envolvimentos do –1 no sentido horário. Assim, P=0 e N=-2, o que significa que existe dois pólos a malha fechada no semiplano direito e o sistema é instável.
a)
b) O = zeros de 1+G(s)H(s) = n° de pólos do sistema a malha fechada
X = pólos de 1 +G(s)H(s) = n° de pólos de G(s)H(s)
Fig. 4.31 – a) sistema estável; b) sistema instável.
UNIDADE IV
28
2.4 Esboço do diagrama de Nyquist Exemplo: Esboçar o diagrama de Nyquist para os sistemas da Figura abaixo.
Sistema de controle de velocidade de uma turbina. À medida que se desloca no sentido horário, ao longo do contorno, do ponto A ao ponto C na Figura (4.32a), o ângulo resultante vai de 0 o a -3x90o=-270o, ou de A' a C' na Fig. (4.32c). Como os ângulos emanam dos pólos no denominador de G(s), os pólos ganham o 270 no sentido anti-horário e a função perde 270o. À medida que a resultante se desloca de A' para C', na Figura (4.8c), sua amplitude muda de acordo com o produto dos módulos dos zeros pelo produto dos módulos dos pólos. Por conseguinte, a resultante vai de um valor finito na freqüência zero até o valor zero na freqüência infinita no ponto C.
a)
b)
UNIDADE IV
29
c) Fig. 4.32 – a) Vetores no contorno em baixas freqüências; b) vetores no contorno em torno do infinito; c) diagrama de Nyquist. O mapeamento do ponto A ao ponto C também pode ser explicado analiticamente. De A a C G(s)=G(jω), ou seja:
G( j)
500 500 2 (s 1)(s 3)(s 10) s j ( 14 30) j(43 3 )
Multiplicando o numerador e o denominador pelo conjugado complexo tem-se:
G( j) 500
( 142 30) j(43 3 ) ( 142 30)2 j(43 3 )2
Na freqüência zero, G(jω)=50/3. Portanto, o diagrama de Nyquist começa em 50/3 com um ângulo de 0o. A medida que ω aumenta a parte real se mantém positiva e a parte imaginária negativa. 30 Em a parte real se torna negativa e em 43 o diagrama de Nyquist 14 corta o eixo real negativo, visto que o termo imaginário é nulo. Continuando aumentando ω em direção ao infinito, a parte real continua negativa e a parte imaginária positiva. j500 Na freqüência infinita, G(jω)= G( j) 2 , ou aproximadamente zero com 90o. Ponto C' na Figura (4.32c). Ao longo do semicírculo do ponto C ao ponto D na Figura (4.32b), os vetores giram cada um deles de 180o no sentido horário e a resultante realiza uma rotação no sentido anti-horário, uma rotação de 3x180o, começando no ponto C' e terminando no ponto D' na Figura (4.32c). No ponto C, os ângulos são todos 90o. Portanto a resultante é 0-270o. De modo semelhante, no ponto D, G(s)=0+270o e é mapeado no ponto D'. Pode-se selecionar pontos intermediários para verificar a espiral, cujo valor radial tende a zero na origem. Como a parte real é uma função par e a parte imaginária uma função ímpar, o diagrama é simétrico com relação ao eixo real. Quando há pólos a malha aberta situados sobre o contorno, torna-se necessário fazer um desvio ao redor dos pólos; caso contrário, o mapeamento iria para o infinito de uma forma indeterminada, sem informação angular. A Figura (4.33a) mostra os esboços com os desvios dos pólos.
UNIDADE IV
30
a) b) c) Fig. 4.33 – Contorno dos pólos a malha aberta; a) pólos no contorno; b) contorno à direita; c) contorno à esquerda. Quando se contorna à direita cada vetor do pólo gira de um ângulo de 180 o , e à esquerda -180o. Exemplo: Esboçar o diagrama de Nyquist de um sistema com retroação unitária s 1 onde G(s) 2 . s Os dois pólos na origem estão no contorno e devem ser desviados, conforme mostra a Figura (4.34a). No ponto A, os dois pólos a malha aberta na origem contribuem com 2x90 o = 180o e o zero contribui com 0o. Nas proximidades da origem a função é infinita mapeando o ponto A no ponto A' localizado no infinito com um ângulo de –180o.
a)
b)
Fig. 4.34 - a) contorno; b) diagrama de Nyquist. De A para B resulta uma variação líquida de 90o devida unicamente ao zero e os ângulos dos pólos permanecem os mesmos. Desta maneira o mapeamento muda para +90o no sentido anti-horário e o vetor mapeado passa de infinito com um ângulo de –180o em A' para zero e ângulo de –90o em B'. ( 2 j) 2 Analiticamente tem-se: G( j) , nas baixas freqüências, G( j) 2 2 j ou 180o e nas altas freqüências, G( j) ou 0 90o. Além disso, as partes reais e imaginárias são negativas.
UNIDADE IV
31
À medida que os vetores se movem ao longo do contorno BCD o vetor do zero e os vetores dos pólos sofrem mudança de –180o cada, com a função de intensidade permanecendo em zero. Desta forma, o vetor mapeado sofre uma variação angular líquida de +180 o que é variação angular do zero menos a soma das variações angulares dos pólos. Finalmente, no trecho EFA, a intensidade resultante tende a infinito. O ângulo do zero não muda, mas cada pólo muda de um ângulo de 180 o .Esta alteração produz uma mudança na função de -2x180o = -360o. Analiticamente tem-se: Em E, G(s) = (20o)/[( -90o)( -90o)] = 180o. Em F, G(s) = (20o)/[( 0o)( 0o)] = 0o. Em A, G(s) = (20o)/[( 90o)( 90o)] = -180o. Uma linha radial de teste a partir de –1, na Figura (4.34b), mostra uma volta em torno do eixo no sentido anti-horário e uma no sentido horário produzindo zero envolvimento. 2.5 Estabilidade por intermédio do diagrama de Nyquist O número de pólos a malha aberta de G(s)H(s) no interior do contorno, e de N, o número de envolvimentos do ponto –1 são usados para determinar Z, o número de pólos a malha fechada situados no semiplano direito. A faixa de valores do ganho, K, para que o sistema seja estável pode ser determinada como no critério do LR e o critério de Routh-Hurwitz. A abordagem geral consiste em ajustar o ganho de malha com valor unitário e esboçar o diagrama de Nyquist. O efeito do ganho é o de multiplicar a resultante por uma constante em qualquer ponto do gráfico. Exemplo: O sistema da Figura (4.35a) tem um ganho variável K.
a)
b) c) Fig. 4.35 – a) diagrama de blocos; b) contorno; c) diagrama de Nyquist.
UNIDADE IV
32
Para este sistema, uma vez que P=2, o ponto crítico deve ser envolvido pelo diagrama de Nyquist, para se obter N=2 e um sistema estável. Uma redução do banho colocaria o ponto crítico fora do diagrama de Nyquist onde N=0, produzindo Z=2, um sistema instável. Outra forma de verificar a estabilidade é supor que o diagrama permaneça estacionário e o ponto –1 se movendo ao longo do eixo real. Para isso, ajusta-se o ganho unitário e posiciona-se o ponto crítico em –1/K em vez de em –1. Desta forma o ponto crítico se afasta da origem quando K diminui e se aproxima quando K diminui. Com base no conceito do LR, quando G(s)H(s)=-1 a variável s é um pólo a malha fechada do sistema. A freqüência na qual o diagrama de Nyquist cruza o ponto –1 é a mesma freqüência em que o LR cruza o eixo imaginário, o que caracteriza um sistema marginalmente estável. Em resumo, se o sistema a malha aberta contém um ganho variável, K, deve-se fazer K=1, para esboçar o diagrama de Nyquist, considerando que o ponto crítico esteja em –1/K e não em –1. Ajustar o valor de K, para gerar estabilidade, com base no critério de Nyquist. Exemplo: Para um sistema com retroação unitária em que G(s)
K , s(s 3)(s 5)
determine o valor de K para a estabilidade e instabilidade.
G( j)
K 82 j(15 3 ) j( j 3)( j 5) K 1 644 2 (15 2 )2
Em =0, G(j)=-0,0356 - j. Fazendo a parte imaginária igual a zero na equação acima encontra-se 15 , que, substituído na mesma equação resulta na parte real igual a – 0,0083. Finalmente, em = G(j)=1/(j)3 = 0 -270o. Com base na Figura (4.36a), P=0; para estabilidade N deve ser igual a zero, de modo que Z=0. Neste caso, K deve ser aumentado de 1/0,083=120,5 antes do diagrama envolver o ponto –1. Portanto, para a estabilidade K<120,5 e K>120,5 para a instabilidade. Se K=120,5 o sistema é marginalmente estável. Neste ganho o gráfico intercepta –1 em 15 rad/s.
a)
b)
Fig. 4.36 – a) contorno; b) diagrama de Nyquist.
UNIDADE IV
33
2.6 Estabilidade por intermédio do mapeamento do eixo j positivo A verificação da estabilidade de um sistema pelo diagrama de Nyquist pode ser simplificado usando apenas o mapeamento do eixo j positivo. O sistema da Figura (4.37) é estável para valores baixos do ganho e instável para valores altos do ganho.
a) b) Fig. 4.37 – a) contorno e LR; b) diagrama de Nyquist. Como o contorno não envolve os pólos a malha aberta, o diagrama de Nyquist deveria envolver o ponto –1 para haver estabilidade. Pode-se ver a partir do diagrama de Nyquist que o envolvimento do ponto crítico pode ser determinado apenas com base no mapeamento do eixo j positivo. Se o ganho for pequeno o mapeamento passará a direita de –1 (sistema estável) e se for elevado passará à esquerda (sistema instável). Portanto, este sistema é estável para valores de ganho de malha, K, que garante que, a magnitude a malha aberta é menor que 1 na freqüência onde o ângulo de fase é 180o (ou, de forma equivalente, -180o). No sistema da Figura (4.38), o sistema é instável para baixos ganhos e estável para ganhos elevados.
a) b) Fig. 4.38 – a) contorno e LR; b) diagrama de Nyquist. Para este caso, o sistema é estável se a magnitude da malha aberta for maior que 1 na freqüência onde o ângulo de fase é 180o (ou, de forma equivalente, -180o). Exemplo: Determinar a faixa de valores de ganho para a estabilidade e instabilidade, para um sistema com retroação unitária dado por:
UNIDADE IV
34
G (s )
K (s 2s 2)(s 2) 2
Determine também a freqüência de oscilação em radianos. Como os pólos à malha aberta estão apenas no semiplano esquerdo, não se deseja nenhum envolvimento do ponto –1 para obter a estabilidade. Fazendo K=1 e desenhando o trecho do contorno ao longo do eixo imaginário positivo obtém-se o contorno mostrado na Figura (4.39a). Na Figura (4.39b) a interseção com o eixo real negativo é obtida fazendo s=j, e igualando a zero a parte imaginária de G(s)H(s), ou seja:
G( j) H ( j)
1 (s 2s 2)(s 2) s j 2
4(1 2 ) j(6 2 ) 16(1 2 ) 2 (6 2 )2
fazendo j(6 - 2)=0 tem-se que 6 . Este valor substituído na equação acima resulta na parte real igual a –1/20 180o.
Fig. 4.39 – a) contorno; b) diagrama de Nyquist. Este sistema é estável se a magnitude da resposta em freqüência for menor que 1 em 180o. Portanto, o sistema é estável para K<20 e instável para K>20. 2.7 Margem de ganho e de fase por intermédio do diagrama de Nyquist O conceito do ponto de vista do ganho com fase de 180 o leva às seguintes informações de margem de ganho e margem de fase. Margem de ganho, GM: é a mudança no ganho a malha abeta no ponto com fase de 180o, expressa em decibéis (dB), necessária para tornar instável o sistema em malha fechada. Margem de fase, M: é a mudança no valor da fase a malha aberta, no ponto com ganho unitário, necessária para tornar instável o sistema a malha fechada.
UNIDADE IV
35
Estas duas definições são mostradas graficamente no diagrama de Nyquist na Figura (4.40).
Fig. 4.40 – Margem de ganho e margem de fase pelo diagrama de Nyquist. Admitindo que o sistema da Figura (4.40) é estável se não houver envolvimento do ponto –1, uma diferença de ganho entre o cruzamento do diagrama de Nyquist do eixo real em –1/a e o ponto crítico –1 determina a proximidade da instabilidade do sistema. A margem de ganho é determinada pelo inverso do valor do cruzamento do eixo real expresso em dB, ou seja:
1 20 log a G M 20 log 1 a No ponto Q', onde o ganho é unitário, representa a proximidade da instabilidade do sistema. Portanto, o valor da margem de fase é . Exemplo: Determinar a margem de ganho e de fase para o sistema abaixo.
G (s ) H (s )
6 (s2 2s 2)(s 2)
6 4(1 2 ) j(6 2 ) 16(1 2 ) 2 (6 2 )2
O diagrama de Nyquist cruza o eixo real na freqüência de 6 rad/s. A parte real é calculada como sendo –0,3. Por conseguinte, o ganho pode ser aumentado de (1/0,3)=3,33 antes da parte real se tornar –1. Portanto, a margem de ganho é:
G M 20 log 3,33 10,45 dB
UNIDADE IV
36
Para a margem de fase, determina-se a freqüência na qual a magnitude é unitária:
6 4(1 2 ) j(6 2 ) 1 16(1 2 ) 2 (6 2 )2 O que resulta numa freqüência de 1,253 rad/s, cujo ângulo de fase é de –112,3o. A diferença entre este ângulo e –180o é 67,7o, que é a margem de fase. 3.0 Sistemas com Retardo Supondo um sistema G(s), cuja entrada é R(s) e uma saída C(s), e um outro sistema, G'(s), que retarda a saída por T segundos, a TL de c(t-T) é e-sTC(s), ou seja: Para um sistema sem retardo:
C(s) G(s)R(s) E com retardo
e sT C ( s) R( s)G' ( s) G' (s) e sT G(s)
(4.73) (4.74) (4.75)
Apresentando (4.67) de outra forma tem-se:
G' j e jTG( j) G( j) [T G( j)]
(4.76)
O retardo não afeta a curva de resposta em freqüência, mas reduz a linearidade aumentando a defasagem, T, a partir do diagrama de fase de G(j).
Fig. 4.41 - Efeito do retardo na resposta em freqüência A redução na defasagem causada pelo retardo reduz a margem de fase, tornando a resposta mais oscilatória e reduz a freqüência de margem de ganho, aproximando o sistema da instabilidade.
UNIDADE IV
37
Exemplo: Traçar a resposta em freqüência para o sistema abaixo com um retardo de 1 s.
G(s)
k ss 1s 10
O diagrama de Bode para módulo e fase para k=1 é mostrado na Figura abaixo, onde só o gráfico de fase é afetado pelo retardo. Primeiramente traça-se o gráfico de fase do retardo.
esT 1 T 1 Depois, traça-se o diagrama de fase para G(j), que somada com a fase de retardo dá a curva resultante. Usando uma aproximação de segunda ordem, este acréscimo na margem de fase reduz o fator de amortecimento. a) Qual é a faixa de valores de k para garantir a estabilidade? - Sistema com retardo: a fase é -180o na freqüência de 0,8 rad/s, o que corresponde a -20 dB. logo
20 log k 20 k 10
O ganho k pode ser aumentado de 10 vezes sem se tornar instável.
- Sistema sem retardo: a fase de -180o ocorre em 3 rad/s, o que corresponde à 40 dB. logo
20 log k 40 k 100
Isto mostra que o sistema com retardo fica mais próximo da instabilidade. b) Qual é a ultrapassagem para k=5?
UNIDADE IV
38
-Sistema com retardo: a curva é aumentada de 14 dB, com um ângulo de fase de -145o, na freqüência de 0,5 rad/s e uma margem de fase de 35º. Admitindo um sistema de segunda ordem e usando (4.51) tem-se:
2
tg1
0,33
2 1 4 2
Utilizando (2.20) resulta:
%UP e
1 2
4
100 33%
Resposta ao degrau do sistema com retardo De acordo com a Figura acima, o percentual de ultrapassagem é 38%. - Sistema sem retardo: A linha de cruzamento de zero dB ocorre em 0,5 rad/s, com fase de -118o e uma margem de fase de 62º De forma semelhante encontra-se 0,64 e %UP 7,3% . De acordo com a Figura abaixo o percentual de ultrapassagem é aproximadamente 5%, com um tempo de assentamento menor.
Resposta ao degrau do sistema sem retardo PROGRAMAS MATLAB 1. Esboça os gráficos de Bode de módulo e de fase G
(s 3) (s 2)(s 2 2s 25)
UNIDADE IV
39
clf % Apaga gráficos existentes na tela. numg=[1 3]; % Define o numerador de G(s). deng=conv([1 2],[1 2 25]); % Define o denominador de G(s). G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Bode . bode(G) % Constrói um gráfico de Bode. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma % legenda ao gráfico de Bode. [mag,fase,w]=bode(G); % Armazena pontos do gráfico de Bode. pontos=[20*log10(mag(:,:))',fase(:,:)',w] % Lista pontos do gráfico de Bode % com magnitude em dB. Pause 2. Faixa de valores de ganho para a estabilidade usando Bode G
k (s 2)(s 4)(s 5)
numg=1; deng=poly([-2 -4 -5]); 'G(s)' G=tf(numg,deng) [Gm,Pm,Wcg,Wcp]=margin(G);
% Define o numerador de G(s). % Define o denominador de G(s). % Exibe título. % Cria e mostra G(s). % Obtém as margens de % ganho e de fase % e as freqüências correspondentes. % Mostra o valor de K para estabilidade.
K=Gm Pause
3. Traçar o diagrama de Bode com retardo
G
k s(s 1)s 10)
Retardo de 1s
clf % Apaga gráficos existentes na tela. hold off % Desativa a função hold. numg=1; % Define o numerador de G(s). deng=poly([0 -1 -10]); % Define o denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). w=0.01:0.1:10; % Faz 0,01<w<10 em incrementos de 0,1. [magg,faseg]=bode(G,w); % Coleta dados dos diagramas % de Bode de G(s). [numd,dend]=pade(1,6); % Representa o retardo. Gd=tf(numd,dend); % Cria e mostra o retardo, % Gd(s). [magd,fased]=bode(Gd,w); % Coleta dados dos diagramas % de Bode de Gd(s). Ge=Gd*G; % Forma Gd(s)G(s). [mage,phasee]=bode(Ge,w); % Coleta dados dos diagramas % de Bode de Gd(s)G(s). subplot(2,1,1) % Subdivide a área para plotar o gráfico 1.
UNIDADE IV
40
semilogx(w,20*log10(mage(:,:))) % Plota a curva de magnitude. grid on % Ativa a grade para o gráfico de magnitude. axis([0.01,10,-80,20]); % Limita os eixos do gráfico de Bode. title('Magnitude da Resposta com Retardo') % Adiciona legenda % a resposta em magnitude. xlabel('Freqüência (rad/s)') % Rotula o eixo x da magnitude % da resposta. ylabel('20log M') % Rotula o eixo y eixo da magnitude. subplot(2,1,2) % Subdivide a área do gráfico para o gráfico 2. semilogx(w,faseg(:,:),w,fased(:,:),w,fasee(:,:))% Plota as % curvas de fase de G(s), % Gd(s), e G(s)Gd(s) em um único gráfico. grid on % Ativa a grade para o gráfico de fase. axis([0.01,10,-900,0]); % Limita os eixos do gráfico de Bode. title('Resposta de Fase com Retardo') % Adiciona legenda à % curva de fase. xlabel('Freqüência (rad/s)') % Rotula o eixo x da % resposta de fase. ylabel('Fase (graus)') % Rotula o eixo y eixo da % resposta de fase. text(1.5,-50,'Retardo') % Gera dístico para identificar % a curva de retardo. text(4,-150,'Sistema') % Gera dístico para identificar % a curva Sistema . text(2.7,-300,'Total') % Gera dístico para identificar % a curva Total. pause 4. Projeta a resposta transitória por meio de ajuste do ganho
Valor requerido: %U=9,5% clf % Apaga gráficos existentes na tela. numg=[100]; % Define o numerador de G(s). deng=poly([0 -36 -100]); % Define o denominador de G(s). G=tf(numg,deng) % Cria e mostra G(s). up=input('Digite %UP '); % Entre com o valor desejado % de ultrapassagem percentual. z=(-log(up/100))/(sqrt(pi^2+log(up/100)^2)); % Calcula a relação de % amortecimento necessária. Pm=atan(2*z/(sqrt(-2*z^2+sqrt(1+4*z^4))))*(180/pi); % Calcula a margem de fase necessária. w=0.01:0.01:1000; % Ajusta a faixa de freqüências de 0,01 a % 1000 em incrementos de 0,01. [M,P]=bode(G,w); % Coleta os dados de Bode.
UNIDADE IV
41
Ph=-180+Pm; % Calcula o ângulo de fase necessário. for k=1:1:length(P); % Busca nos dados de Bode o % ângulo de fase % necessário. if P(k)-Ph<=0; % Se o ângulo de fase requerido for encontrado, % obter o valor da M=M(k); % magnitude na mesma freqüência. 'Valor requerido de K' % Exibe título. K=1/M % Calcula o ganho requerido. break % Interrompe o laço. end % Fim de if. end % Fim de for. T=feedback(K*G,1); % Obtém T(s) usando o valor calculado de K. step(T) % Gera uma resposta ao degrau . title(['Resposta ao Degrau a Malha Fechada para K= ',num2str(K)]) % Adiciona legenda à resposta ao degrau. Pause 5. Plota o diagrama de Nyquist clf % Apaga gráficos existentes na tela. numg=[1 2]; % Define numerador de G(s). deng=[1 0 0]; % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói o gráfico de Nyquist. title('Resposta de Freqüência a Malha Aberta') w=0:0.5:10; % Faz 0<w<10 em incrementos de 0,5. [re,im]=nyquist(G,w); % Obtém pontos do gráfico de Nyquist % uma faixa de valores de w. pontos=[re(:,:)',im(:,:)',w'] %Lista pontos especificados em %uma faixa de valores do gráfico de Nyquist. Pause 6. Determina a margem de ganho e de fase clf % Apaga gráficos existentes na tela. numg=6; % Define numerador de G(s). deng=conv([1 2],[1 2 2]); % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói um diagrama de Nyquist. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma legenda ao diagrama de Nyquist. [Gm,Pm,Wcg,Wcp]=margin(G);%Obtém as margens de ganho e de fase % e as freqüências correspondentes. 'Margem de Ganho(dB); Margem de Fase(graus); freqüência de 180 graus (rad/s);' 'freqüência de 0 dB (rad/s)' % Exibe título.
UNIDADE IV
42
margens=[20*log10(Gm),Pm,Wcg,Wcp] % Exibe os dados de margens. Pause 7. Calcula a faixa de ganho pelo diagrama de Nyquist clf % Apaga gráficos existentes na tela. numg=[1 2]; % Define numerador de G(s). deng=[1 0 0]; % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói o gráfico de Nyquist. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma legenda ao gráfico de Nyquist. w=0:0.5:10; % Faz 0<w<10 em incrementos de 0,5. [re,im]=nyquist(G,w);%Obtém pontos do gráfico de Nyquist para % uma faixa de valores de w. pontos=[re(:,:)',im(:,:)',w'] % Lista pontos especificados em %uma faixa de valores do gráfico de Nyquist. pause numg=1; % Define o numerador de G(s).
EXERCÍCIOS
4.1 - a) Determinar as expressões analíticas para magnitude e a fase da resposta em frequência de:
G (s) b)
1 (s 2)(s 4)
Construa os gráficos logarítmicos de magnitude e de fase usando o logaritmo da frequência em rad/s como abcissa.
4.2 - Construir os gráficos logarítmicos de magnitude e de fase de Bode da Figura abaixo onde: (s 20) G(s) (s 10)(s 7)(s 50)
4.3 - Para o sistema da Figura abaixo onde: G(s)
k (s 5)(s 20)(s 50)
UNIDADE IV
43
a) Desenhe os gráfico logarítmicos de Bode de módulo e fase; b) A partir do diagrama de Bode, encontre as faixas de valores de k para manter o sistema estável; c) Calcule a margem de ganho, a margem de fase, a frequência de zero dB e a fase de 180o a partir do diagrama de Bode para k=10.000. 4.4 -
Determinar a constante de erro estático para um sistema com retroação unitária, estável, cuja FT em malha aberta, tem o diagrama de módulo de Bode mostrado na Figura abaixo.
4.5 - Para o sistema da Figura abaixo, onde: G (s)
10 s(s 1)
Determine a margem de fase quando há um retardo no percurso direto de 0s, 3s e 7s. 4.6 - Estimar G(s) cujos gráficos de módulo e de fase, de Bode, são mostrados na Figura abaixo.
UNIDADE IV
44
4.7 - Para o sistema com retroação unitária com a seguinte FT:
G (s)
k s(s 50)(s 120)
Use as técnicas de resposta em frequência (diagrama de Bode) para obter o ganho k para uma resposta ao degrau unitário com 20% de ultrapassagem. 4.8 Esboçar o diagrama de Nyquist para o sistema mostrado na Figura abaixo.
G (s )
1 (s 2)(s 4)
4.9 Para o sistema do exercício 4.8, onde:
G (s )
K (s 2)(s 4)(s 6)
a) Plote o diagrama de Nyquist; b) Determine a faixa de valores de ganho, K, para estabilidade. 4.10 Determinar a margem de ganho e a freqüência de 180 o do Exercício 4., para K=100. s 2 2s 1 4.11 Para o sistema com retroação unitária: G(s) 3 . Plote o s 0,2s 2 2s 1 diagrama de Nyquist e examine a estabilidade do sistema a malha fechada. 4.12 - Considere o sistema com retroação unitária, cuja FT de malha aberta é:
G (s)H(s)
ke Ts s(s 1)
Determine, em função do tempo morto T, o máximo valor de k para que haja estabilidade.
UNIDADE IV
45
44 páginas
ANÁLISE NO DOMÍNIO DA FREQUÊNCIA A resposta em freqüência produz um novo enfoque vantajoso sobre o LR nas seguintes situações: 1. quando se modela FT a partir de dados físicos; 2. quando se projeta compensadores de avanço de fase para atender o erro de estado estacionário e a resposta transitória requerida; 3. ao se determinar a estabilidade dos sistemas não-lineares; 1.0
CONCEITO DE RESPOSTA EM FREQUÊNCIA
Entradas senoidais aplicadas à sistemas lineares geram respostas senoidais de mesma freqüência, diferenciando apenas em amplitude e fase. A magnitude da resposta em freqüência é a relação entre as magnitudes de entrada e de saída. Ambas são funções da freqüência e se aplicam apenas à resposta de estado estacionário. Considere o sistema mostrado na Figura (4.1).
a)
b)
c) Fig. 4.1 - a) sistema; b) função de transferência; c) formas de onda de entrada e de saída A senóide de estado estacionário de saída é:
UNIDADE IV
2
M o ()o () M e ()M()e () ()
(4.1)
A função do sistema á dada por:
M o () e () o () e () M e () 1.1 Expressões Analíticas de Resposta em Freqüência M()
(4.2)
A Figura (4.2) mostra um sistema G(s) com a transformada de Laplace de uma senóide genérica na entrada.
r ( t ) A cos(t ) Bsen(t ) A2 B2 cos[t tg1 ( B / A)]
(4.3)
Fig. 4.2 - Sistema com entrada senoidal A resposta C(s) é dada por:
C(s)
As B G (s ) s2 2
(4.4)
Separando a solução forçada da solução transitória, executando uma expansão em frações parciais: As B k1 k C(s) G (s ) 2 termos das FP de G(s) (4.5) (s j)(s j) s j s j Expansão de G(s) em frações parciais.
G(s)
N(s) N(s) D(s) (s p1 )(s p2 )...(s p m ) k1 k k 2 ... m s p1 s p2 s pm
(4.6)
Se a ordem de N(s) for inferior a ordem de D(s), para calcular k m, multiplica-se (4.6) por (s+pm). (s p m )G (s )
( s p m ) N (s ) (s p1 )(s p2 )...(s p m )
(s p m )
k1 k2 (s p m ) ... (s p1) (s p 2 )
(s p m )
k m 1 km (s p m 1 )
(4.7)
UNIDADE IV
3
Fazendo s pm , em (4.7), todos os termos da direita tenderão a zero, exceto o termo km.
(s p m ) N ( s ) km (s p1 )(s p2 )....(s p m ) s p
logo
(4.8)
m
No caso de (4.5) tem-se: k1
As B 1 1 G (s ) A jB G( j) M e e je M G e jG (s j) 2 s - j 2
M e M G j( e G ) e 2 As B 1 1 k2 G (s ) A jB G( j) M e e je M G e jG (s j) 2 s j 2
M e M G j( e G ) e k1* 2
(4.9)
(4.10)
*
onde k 1 é o conjugado complexo de k 1 .
M G G( j)
e
G ângulo de G(j)
(4.11)
A saída senoidal de estado estacionário é:
k1 k2 Css s j s j
M e M G j( e G ) M e M G j( e G ) e e 2 2 s j s j
(4.12)
Aplicando a transformada de Laplace inversa tem-se:
e j( t e G ) e j( t e G ) M e M G cos(t e G ) c( t ) M e M G 2
(4.13)
que pode ser representada na forma de fasor por:
Mss ( Mee )( MGG )
(4.14)
Com base em (4.11) M G G é a função resposta de freqüência de um sistema cuja FT é G(s), onde: G( j) G(s)s j
(4.15)
UNIDADE IV
4
1.2 Gráfico da resposta em freqüência Pode ser plotada de várias formas; duas delas são: 1. Através de gráficos separados de magnitude e de fase, em função da freqüência (diagramas de Bode); 2. Por meio de um gráfico polar onde o comprimento do fasor é a magnitude e o ângulo é a fase (diagrama de Nyquist). 2.0 DIAGRAMA DE BODE Para o caso 1), a curva de magnitude pode ser traçada em decibéis (dB), onde dB=20logM. Exemplo: Determinar a expressão analítica de magnitude e de fase da resposta em freqüência do seguinte sistema:
G (s )
1 s2
Fazendo s j na FT acima tem-se:
G( j)
1 2 j 2 j 2 4
cujo módulo é dado por:
G( j) M()
1 (2 4)
onde o módulo em dB e a fase são:
1 20 log M() 20 log (2 4)
e
() tg1 2
Fig. 4.3 - Diagrama de módulo e de fase de G(s)
UNIDADE IV
5
2.1 Aproximações assíntotas: Gráficos de Bode As curvas logarítmicas de módulo e de fase são chamadas de gráfico de Bode. O gráfico de Bode pode ser simplificado por uma seqüência de linhas retas. Considere a seguinte FT:
G (s )
k(s z1 )(s z 2 )...(s z k ) s m (s p 1 )(s p2 )...(s p n )
G( j)
(4.16)
k s z1 s z 2 ... s z k s m s p1 s p2 ... s p n
(4.17) s j
20 log G( j) 20 log k 20 log s z1 20 log s z 2 ... 20 log s z k 20 log sm 20 log s p1 20 log s p2 .... 20 log pn s jw
(4.18)
Gráfico do módulo e de fase de Bode para G(s)=(s+a)
G(s) (s a ) G( j) ( j a ) a j 1 a
(4.19) (4.20)
Nas baixas freqüências, quando 0 , tem-se G( j) a e a resposta em freqüência em dB é 20 log M 20 log( a ) . Nas altas freqüências, onde a tem-se: j G( j) a a 90o 90o a a
(4.21)
e a resposta em freqüência em dB é: 20 log M 20 log( )
Fig. 4.4 - Diagrama de módulo de Bode assintótica para G(s)=s+a
(4.22)
UNIDADE IV
6
Na freqüência de quebra a , a Equação (4.20) mostra que a fase é 45 º, ou seja: (4.23) G( j) a j 1 j1 1 a e nas baixas freqüências, Equação (4.20), a fase é zero. G( j) a
(4.24)
e nas altas freqüências, Equação (4.20), a fase é 90º. j G( j) a a 90o a a
Fig. 4.5 - Diagrama de fase de Bode assintótica para G(s)=s+a Tab. 4.1 - Resposta em freqüência assintótica e real normalizada
(4.25)
UNIDADE IV
7
Fig. 4.6 - Diagrama de Bode em módulo assintótica e real normalizada
Fig. 4.7 - Diagrama de Bode em fase assintótica e real normalizada Diagrama de Bode para G(s)=1/(s+a)
G (s )
1 sa
(4.26)
Esta função tem um a assíntota de baixas freqüências dada por:
1 G(s) 0o a e para altas freqüências:
(4.27)
UNIDADE IV
8
1 1 90o j
(4.28)
20 log M 20 log( )
(4.29)
G (s ) Em dB tem-se:
Fig. 4.8 - Diagrama de Bode em módulo assintótica normalizada
Fig. 4.9 - Diagrama de Bode em fase assintótica normalizada Diagrama de Bode para G(s)=s
a)
b) Fig. 4.10 - Diagrama de Bode para G(s)=s; a) módulo; b) fase
UNIDADE IV
9
Diagrama de Bode para G(s)=1/s
a)
b)
Fig. 4.11 - Diagrama de Bode para G(s)=1/s; a) módulo; b) fase Exemplo: Esboce o gráfico de Bode para o sistema G(s)
k(s 3) . s(s 1)((s 2)
A equação acima pode ser escrita da seguinte forma:
3 s k 1 2 3 G (s ) s s(s 1) 1 2
a)
b) Fig. 4.12 - Diagrama de módulo de Bode; a) funções separadas; b) resultante
UNIDADE IV
10
a)
b) Fig. 4.13 - Diagrama de fase de Bode; a) funções separadas; b) resultante Diagrama de Bode para fatores de segunda ordem O polinômio de segunda ordem é da forma:
s2 G(s) s2 2 ns 2n 2n 2 2 ns 2n n Nas baixas freqüências, (4.30) se transforma em:
G(s) 2n0o
(4.30)
(4.31)
e o módulo em dB é:
20 log M 20 log G(s) 20 log 2n
(4.32)
Nas altas freqüências tem-se: G(s) s2 2 2180o
(4.33)
e o módulo em dB é:
20 log M 20 log G(s) 20 log 2 40 log
(4.34)
UNIDADE IV
11
Fig. 4.14 - Diagrama de módulo de Bode Nas baixas freqüências, a fase é 0o e nas altas é 180o. Para determinar a fase na freqüência natural faz-se s j , ou seja:
G( j) s2 2 ns 2n
s j
2 n
2 j2 n
(4.35)
Fazendo n tem-se: G( j) j2 2n
(4.36)
De acordo com (4.36) a fase é +90º.
Fig. 4.15 - Diagrama de fase de Bode Como a função de segunda ordem depende do fator de amortecimento , o erro das assíntotas é maior que no sistema de primeira ordem. Com base na Equação (4.35) tem-se: M
2 n
2 (2 n )2
e
tg1
2 n 2n 2
(4.37)
(4.38)
UNIDADE IV
12
a)
b) Fig. 4.16 - Diagrama de Bode para a Equação (4.37); a) módulo; b) fase O polinômio de segunda ordem é da forma: G (s )
1 s 2 ns 2n 2
O raciocínio é similar ao caso anterior.
(4.39)
UNIDADE IV
13
a)
b) Fig. 4.17 - Diagrama de Bode para a Equação (4.39); a) módulo; b) fase 2.2 Estabilidade, margem de ganho e margem de fase através do diagrama de Bode A margem de fase e a margem de ganho informam quão estável o sistema é. Sistemas com margem de ganho e de fase maiores podem suporta maiores mudanças nos parâmetros dos sistemas antes de se tornarem instáveis. As margem de ganho e de fase podem ser qualitativamente relacionadas com o LR, no sentido de que, sistemas cujos pólos estão mais distantes do eixo imaginário, apresentam um maior grau de estabilidade. Margem de ganho, GM. É a mudança no valor do ganho, em dB, em malha aberta, no ponto com fase de 180o, necessário para tornar o sistema instável em malha fechada.
UNIDADE IV
14
Margem de fase, M. É a mudança no valor da fase em malha aberta, no ponto com ganho unitário, necessário para tornar o sistema instável em malha fechada. Margem de ganho e de fase a partir do diagrama de Bode A Figura (4.18) mostra a margem de ganho e de fase no diagrama de Bode.
Fig. 4.18 - Margens de ganho e de fase onde M é a freqüência de margem de fase e GM é a freqüência de margem de ganho. Exemplo: Determinar a faixa de valores de k para o qual o sistema com retroação unitária abaixo é estável.
G (s )
k (s 2)(s 4)(s 5)
O sistema em malha fechada será estável, se a resposta em freqüência for menor que a unidade, quando a fase for 180º. Para traçar o diagrama de Bode de módulo e fase é necessário conhecer o valor de k. O digrama de Bode da Figura abaixo foi traçado para um valor de k=40. Na freqüência de 7 rad/s, onde a fase é -180o, a magnitude é -20 dB. Por conseguinte, é possível um aumento no ganho de 20 dB (que corresponde a um ganho de 10), para o sistema se tornar instável. Portanto, o ganho necessário é 10x40=400. Logo 0
UNIDADE IV
15
A margem de fase é determinada no ponto onde o módulo cai de -13,98dB, o que corresponde a -165o-(-180o)=15o na freqüência de 5,5 rad/s
2.3 Relação entre resposta transitória e resposta em freqüência em MF Considere o sistema de controle, com retroação, de segunda ordem, dado pela seguinte FT em malha fechada:
T (s )
C(s) 2n 2 R (s) s 2 ns 2n
(4.40)
Fig. 4.19 - Sistema de segunda ordem em MF A magnitude de resposta em freqüência em malha fechada é:
M T( j)
2n
2n
4
2 2
(4.41) 2
2n 2
UNIDADE IV
16
Fig. 4.20 - Gráfico logarítmico de módulo dado por (4.41) Elevando (4.41) ao quadrado, derivando com relação a e fazendo a derivada igual a zero tem-se: 2
MP
1
(4.42)
2 1 2
e
P n 1 2 2
(4.43)
Uma outra relação entre a resposta em freqüência e a resposta no domínio do tempo é a banda passante, BW , cujo valor corresponde ao ponto onde a curva de módulo cai 3 dB com relação à freqüência zero (Fig. 4.20). Neste caso, fazendo M=0,707 em (4.41), resulta em:
BM n 1 2 2 4 4 4 2 2
(4.44)
Para relacionar BW com o tempo de assentamento, substitui-se n 4 Ts em (4.44) que resulta em: BM
1 2
4 Ts
2
4 4 4 2 2
(4.45)
De modo semelhante, como n TP 1 2 :
BM
TP 1
1 2 2
2
4 4 4 2 2
2.4 Fator de amortecimento a partir da margem de fase Considere um sistema com retroação unitária cuja FT em malha aberta é:
(4.46)
UNIDADE IV
17
G (s )
2n s(s 2 n )
(4.47)
Para calcular a margem de fase deve-se fazer G( j) 1 , ou seja:
2n 2 j2 n
1
(4.48)
A freqüência 1 que satisfaz (4.48) é:
1 n 2 2 1 4 4 O ângulo de fase nesta freqüência é:
G( j) 90 tg1
90 tg1
(4.49)
1 2 n
2 2 4 4 1
2 A diferença entre o ângulo dado por (4.50) e -180o é a margem de fase: M 90 tg1
(4.50)
2 2 1 4 4 2
2
tg1
2 1 4 2
(4.51) 4
Fig. 4.21 - Gráfico de margem de fase dado por (4.51) De acordo com (4.43) não existe freqüência de pico se 0,707 . Portanto, a partir da Figura (4.21) é necessário uma margem de fase M 65,52 , a partir da resposta em malha aberta para assegurar que não existirá pico na resposta em malha fechada. o
UNIDADE IV
18
2.5 Erro de estado estacionário a partir da resposta em freqüência Os valores de kp, kv e ka para sistema s do tipo 0, tipo1 e tipo 2, respectivamente podem ser obtidos a partir do diagrama de Bode. Constante de posição kp Considere o seguinte sistema tipo 0 n
(s z i )
G(s) k im1 (s p i )
(4.52)
i 1
Cujo valor inicial é: n
zi
20 log M 20 log k im1 pi
(4.53)
i 1
Mas para um sistema tipo 0: n
zi
k p k im1 pi
(4.54)
i 1
Que é o mesmo valor do eixo nas baixas freqüências.
Fig. 4.22 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 0 Constante de velocidade Considere um sistema dado do tipo1 dado por: n
G (s ) k
(s z i )
i 1 m
s (s p i ) i 1
O diagrama de Bode começa em:
(4.55)
UNIDADE IV
19 n
zi
i 1 m
20 log M 20 log k
(4.56)
o pi i 1
A inclinação -20 dB/década pode ser pensada como se originando a partir de uma função: n
zi
G ' (s ) k
i 1 m
(4.57)
s pi
i 1 G'(s) cruza o eixo de freqüência quando: n
zi
k im1 pi
(4.58)
i 1
Mas, para o sistema original (4.56) : n
zi
k v k im1 pi
(4.59)
i 1
Que é a interseção com o eixo de freqüências como mostra a Figura (4.23).
Fig. 4.23 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 1 Constante de aceleração Para determinar ka, para um sistema tipo 2, considere o seguinte sistema: n
G (s ) k
(s z i )
i 1 m 2
(4.60)
s (s p i ) i 1
O diagrama de Bode se inicia em: n
20 log M 20 log k
zi
i 1 m 2o pi i 1
(4.61)
UNIDADE IV
20
A inclinação de -40 dB/década pode ser vista como originária de uma função: n
G ' (s ) k
zi
i 1 m 2
(4.62)
s pi i 1
G'(s) cruza o eixo de freqüência quando: n
zi
k im1 pi
(4.63)
i 1
Mas, para o sistema original (4.60) tem-se: n
zi
k a k im1 pi
(4.64)
i 1
Portanto, a inclinação inicial cruza o eixo de freqüência em
ka .
Fig. 4.24 - Diagrama de Bode mostrando a constante de erro estático para um sistema do tipo 2 Exemplo: Para cada diagrama da Figura abaixo. Determine o tipo de sistema e a constante de erro estático apropriada. Sistema tipo 0
Uma vez que a inclinação inicial á zero, o valor de kp é dado pela assíntota de baixa freqüência.
UNIDADE IV
21
20 log k p 25 k p 17,78 Sistema tipo 1
Uma vez que a inclinação é -20dB/déc., o valor de kv é dado pelo valor da freqüência que cruza o diagrama em 0,55 . Sistema tipo 2
Uma vez que a inclinação inicial é -40dB/década, o valor da freqüência é:
k a k a 33 9 2.6 Resposta transitória através do ajuste de ganho Observando-se a Figura (4.25) pode-se vê que para se obter uma margem de fase CD é necessário elevar o ganho de AB na curva de módulo. Portanto, um simples ajuste de ganho muda a margem de fase e a ultrapassagem percentual. Procedimento de projeto 1. Traçar o diagrama de Bode de módulo e de fase para um ganho conveniente; 2. Usando (2.21) e (4.51) determinar a margem de fase requerida a partir da ultrapassagem percentual; 3. Determinar a freqüência M no diagrama de fase de Bode que leva à fase desejada; 4. Mudar o ganho do valor AB para forçar a curva de módulo cruzar 0 dB na freqüência M .
UNIDADE IV
22
Fig. 4.25 - Diagrama de módulo e de fase de Bode Exemplo: Para o sistema da Figura abaixo, determinar o valor do ganho do préamplificador, k, para que a resposta transitória a uma entrada em degrau apresente uma ultrapassagem de 9,5%.
Sistema de controle de posição 1. Escolher k=3,6 para iniciar o diagrama de módulo em 0 dB para =0,1 rad/s, como mostra a Figura abaixo. 2. Usando a Equação (2.21), uma ultrapassagem de 9,5% implica 0,6 , para os pólos em malha fechada dominantes. 3. A Equação (4.51) leva a uma margem de fase de 59,2 º, para 0,6. 4. Uma margem de fase de 59,2o leva a uma fase de -120,8o para uma freqüência de 14,8 rad/s. 5. Na freqüência de 14,8 rad/s, o ganho é -44,8 dB. Como o gráfico de módulo foi traçado para k=3,6, é necessário um ganho de 44,2 dB, ou seja, k=3,6x162,2=583,9 para obter a margem de fase requerida. A FT de malha aberta com o ganho ajustado é:
G (s )
583.900 s(s 36)(s 100)
UNIDADE IV
23
Diagrama de Bode de módulo e de fase Características do sistema compensado
3.0 ANÁLISE PELO DIAGRAMA DE NYQUIST O critério de Nyquist relaciona a estabilidade de um sistema à malha fechada à resposta de freqüência e a localização dos pólos a malha aberta. O conhecimento da resposta de freqüência do sistema à malha aberta conduz à informação sobre a estabilidade do sistema a malha fechada. Este conceito é semelhante ao do lugar das raízes onde se começa com as informações sobre os pólos e os zeros de malha aberta. 3.1 Dedução do diagrama de Nyquist Considere o diagrama de blocos da Figura (4.26). O critério de Nyquist pode informar quantos pólos a malha fechada estão no semiplano direito.
UNIDADE IV
24
Fig. 4.26 – Sistema de controle a malha fechada
G (s )
NG DG
(4.65)
H (s )
NH DH
(4.66)
G ( s ) H (s ) 1 G(s) H(s) 1 T(s)
NG N H DG D H
(4.67)
N G N H DG D H N G N H DG D H DG D H
(4.68)
N G DG G(s) 1 G (s ) H (s ) D G D H N G N H
(4.69)
Com base nas Eqs. (4.67, 468 e 469) conclui-se que: 1. Os pólos de 1+G(s)H(s) são os mesmos que os pólos de G(s)H(s); 2. Os zeros de 1+G(s)H(s) são os mesmos que os pólos de T(s); 2.2 Mapeamento A substituição de um número complexo s em uma função F(s) resultará em outro número complexo. Este processo é chamado de mapeamento. Por exemplo: A substituição do número complexo s = 4+j3 na função (s 2+2s+1), gera o número complexo 16+j30. Neste caso, diz-se que o ponto 4+3j é mapeado no ponto 16+j30 através da função (s2+2s+1). Para compreender o conceito de mapear contorno pode-se considerar a coleção de pontos mostrada na Figura (4.27) como contorno da A e que cada ponto do contorno seja mapeado no contorno B através da seguinte Expressão: F(s)
(s z1 )(s z 2 )... (s p1 )(s p 2 )...
Fig. 4.27 – Mapeamento do contorno A no contorno B.
(4.70)
UNIDADE IV
25
O ponto Q no contorno A é mapeado no ponto Q! no contorno B através da função F(s). A Figura (4.28) mostra exemplos de mapeamento de um contorno através de algumas F(s) simples. O número resultante R é calcula a partir de números complexos representados por V. 1. Se o mapeamento for feito no sentido horário como mostra a Figura (4.27a), o contorno B será mapeado, também, no sentido horário se o sistema possuir unicamente zeros e no sentido anti-horário se possuir apenas pólos (Figura 4.3b).
Fig. 4.28a – Mapeamento unicamente com zeros.
Fig. 4.28b – Mapeamento unicamente com pólos. 2. Se o pólo ou zero estiver envolvido pelo contorno, o mapeamento envolverá a origem (Figuras 4.27c e d).
Fig. 4.28c – Mapeamento quando o zero é envolvido pelo contorno.
UNIDADE IV
26
Fig. 4.28d – Mapeamento quando o pólo é envolvido pelo contorno. 3. O mapeamento quando a função possui um pólo e um zero, a rotação do pólo e do zero se cancelam, e o mapeamento não envolve a origem (Figura 4.29).
Fig. 4.29 – Mapeamento quando a função possui um pólo e um zero. Supondo que F(s)=1+G(s)H(s) tenha dois zeros e três pólos, cada termo entre parênteses na Eq. (4.70) é um vetor na Figura (4.30). À medida que se desloca ao longo do contorno A na direção horária, cada vetor da Eq. (4.70) que se encontre no interior do contorno A parecerá ser submetido a uma rotação completa (360 o). Por outro lado, para pólos e zeros fora do contorno A parecerá oscilar e retornar à posição anterior, com uma variação angular líquida de 0o.
Fig. 4.30 – Representação do mapeamento por vetor. Como mostra a Figura (4.30), os pólos de 1+G(s)H(s) [Eqs. (4.69)], são também pólos de G(s)H(s) e são conhecidos. Os zeros de 1+G(s)Hs), são também os pólos de T(s) e não são conhecidos. Através da Eq. (4.71) pode-se calcular o número de rotações N no sentido antihorário do mapeamento em torno da origem.
UNIDADE IV
27
N PZ
(4.71)
onde: P é o número de pólos em malha aberta no interior do contorno; Z é o número de pólos a malha fechada no interior do contorno. Se um contorno, A, que envolve o semiplano da direita através de G(s)H(s) então, o número de pólos a malha fechada, Z, no semiplano da direita é igual ao número de pólos à malha aberta, P, que estão no semiplano da direita, menos o número de rotações no sentido anti-horário, N, em torno de –1 do mapeamento. Z PN
(4.72)
2.3 critério de Nyquist para determinar a estabilidade A Figura (4.31a) mostra um contorno, A, que não envolve os pólos a malha fechada. O contorno que é mapeado através de G(s)H(s) no diagrama de Nyquist não envolve –1. Portanto, P=0, N=0 e Z=0. Uma vez que Z é o número de pólos a malha fechada dentro do contorno, A, este sistema não tem pólos no semiplano direito e é estável. Na Figura (4.30b), embora o contorno, A, não circunscreva pólos à malha aberta gera dois envolvimentos do –1 no sentido horário. Assim, P=0 e N=-2, o que significa que existe dois pólos a malha fechada no semiplano direito e o sistema é instável.
a)
b) O = zeros de 1+G(s)H(s) = n° de pólos do sistema a malha fechada
X = pólos de 1 +G(s)H(s) = n° de pólos de G(s)H(s)
Fig. 4.31 – a) sistema estável; b) sistema instável.
UNIDADE IV
28
2.4 Esboço do diagrama de Nyquist Exemplo: Esboçar o diagrama de Nyquist para os sistemas da Figura abaixo.
Sistema de controle de velocidade de uma turbina. À medida que se desloca no sentido horário, ao longo do contorno, do ponto A ao ponto C na Figura (4.32a), o ângulo resultante vai de 0 o a -3x90o=-270o, ou de A' a C' na Fig. (4.32c). Como os ângulos emanam dos pólos no denominador de G(s), os pólos ganham o 270 no sentido anti-horário e a função perde 270o. À medida que a resultante se desloca de A' para C', na Figura (4.8c), sua amplitude muda de acordo com o produto dos módulos dos zeros pelo produto dos módulos dos pólos. Por conseguinte, a resultante vai de um valor finito na freqüência zero até o valor zero na freqüência infinita no ponto C.
a)
b)
UNIDADE IV
29
c) Fig. 4.32 – a) Vetores no contorno em baixas freqüências; b) vetores no contorno em torno do infinito; c) diagrama de Nyquist. O mapeamento do ponto A ao ponto C também pode ser explicado analiticamente. De A a C G(s)=G(jω), ou seja:
G( j)
500 500 2 (s 1)(s 3)(s 10) s j ( 14 30) j(43 3 )
Multiplicando o numerador e o denominador pelo conjugado complexo tem-se:
G( j) 500
( 142 30) j(43 3 ) ( 142 30)2 j(43 3 )2
Na freqüência zero, G(jω)=50/3. Portanto, o diagrama de Nyquist começa em 50/3 com um ângulo de 0o. A medida que ω aumenta a parte real se mantém positiva e a parte imaginária negativa. 30 Em a parte real se torna negativa e em 43 o diagrama de Nyquist 14 corta o eixo real negativo, visto que o termo imaginário é nulo. Continuando aumentando ω em direção ao infinito, a parte real continua negativa e a parte imaginária positiva. j500 Na freqüência infinita, G(jω)= G( j) 2 , ou aproximadamente zero com 90o. Ponto C' na Figura (4.32c). Ao longo do semicírculo do ponto C ao ponto D na Figura (4.32b), os vetores giram cada um deles de 180o no sentido horário e a resultante realiza uma rotação no sentido anti-horário, uma rotação de 3x180o, começando no ponto C' e terminando no ponto D' na Figura (4.32c). No ponto C, os ângulos são todos 90o. Portanto a resultante é 0-270o. De modo semelhante, no ponto D, G(s)=0+270o e é mapeado no ponto D'. Pode-se selecionar pontos intermediários para verificar a espiral, cujo valor radial tende a zero na origem. Como a parte real é uma função par e a parte imaginária uma função ímpar, o diagrama é simétrico com relação ao eixo real. Quando há pólos a malha aberta situados sobre o contorno, torna-se necessário fazer um desvio ao redor dos pólos; caso contrário, o mapeamento iria para o infinito de uma forma indeterminada, sem informação angular. A Figura (4.33a) mostra os esboços com os desvios dos pólos.
UNIDADE IV
30
a) b) c) Fig. 4.33 – Contorno dos pólos a malha aberta; a) pólos no contorno; b) contorno à direita; c) contorno à esquerda. Quando se contorna à direita cada vetor do pólo gira de um ângulo de 180 o , e à esquerda -180o. Exemplo: Esboçar o diagrama de Nyquist de um sistema com retroação unitária s 1 onde G(s) 2 . s Os dois pólos na origem estão no contorno e devem ser desviados, conforme mostra a Figura (4.34a). No ponto A, os dois pólos a malha aberta na origem contribuem com 2x90 o = 180o e o zero contribui com 0o. Nas proximidades da origem a função é infinita mapeando o ponto A no ponto A' localizado no infinito com um ângulo de –180o.
a)
b)
Fig. 4.34 - a) contorno; b) diagrama de Nyquist. De A para B resulta uma variação líquida de 90o devida unicamente ao zero e os ângulos dos pólos permanecem os mesmos. Desta maneira o mapeamento muda para +90o no sentido anti-horário e o vetor mapeado passa de infinito com um ângulo de –180o em A' para zero e ângulo de –90o em B'. ( 2 j) 2 Analiticamente tem-se: G( j) , nas baixas freqüências, G( j) 2 2 j ou 180o e nas altas freqüências, G( j) ou 0 90o. Além disso, as partes reais e imaginárias são negativas.
UNIDADE IV
31
À medida que os vetores se movem ao longo do contorno BCD o vetor do zero e os vetores dos pólos sofrem mudança de –180o cada, com a função de intensidade permanecendo em zero. Desta forma, o vetor mapeado sofre uma variação angular líquida de +180 o que é variação angular do zero menos a soma das variações angulares dos pólos. Finalmente, no trecho EFA, a intensidade resultante tende a infinito. O ângulo do zero não muda, mas cada pólo muda de um ângulo de 180 o .Esta alteração produz uma mudança na função de -2x180o = -360o. Analiticamente tem-se: Em E, G(s) = (20o)/[( -90o)( -90o)] = 180o. Em F, G(s) = (20o)/[( 0o)( 0o)] = 0o. Em A, G(s) = (20o)/[( 90o)( 90o)] = -180o. Uma linha radial de teste a partir de –1, na Figura (4.34b), mostra uma volta em torno do eixo no sentido anti-horário e uma no sentido horário produzindo zero envolvimento. 2.5 Estabilidade por intermédio do diagrama de Nyquist O número de pólos a malha aberta de G(s)H(s) no interior do contorno, e de N, o número de envolvimentos do ponto –1 são usados para determinar Z, o número de pólos a malha fechada situados no semiplano direito. A faixa de valores do ganho, K, para que o sistema seja estável pode ser determinada como no critério do LR e o critério de Routh-Hurwitz. A abordagem geral consiste em ajustar o ganho de malha com valor unitário e esboçar o diagrama de Nyquist. O efeito do ganho é o de multiplicar a resultante por uma constante em qualquer ponto do gráfico. Exemplo: O sistema da Figura (4.35a) tem um ganho variável K.
a)
b) c) Fig. 4.35 – a) diagrama de blocos; b) contorno; c) diagrama de Nyquist.
UNIDADE IV
32
Para este sistema, uma vez que P=2, o ponto crítico deve ser envolvido pelo diagrama de Nyquist, para se obter N=2 e um sistema estável. Uma redução do banho colocaria o ponto crítico fora do diagrama de Nyquist onde N=0, produzindo Z=2, um sistema instável. Outra forma de verificar a estabilidade é supor que o diagrama permaneça estacionário e o ponto –1 se movendo ao longo do eixo real. Para isso, ajusta-se o ganho unitário e posiciona-se o ponto crítico em –1/K em vez de em –1. Desta forma o ponto crítico se afasta da origem quando K diminui e se aproxima quando K diminui. Com base no conceito do LR, quando G(s)H(s)=-1 a variável s é um pólo a malha fechada do sistema. A freqüência na qual o diagrama de Nyquist cruza o ponto –1 é a mesma freqüência em que o LR cruza o eixo imaginário, o que caracteriza um sistema marginalmente estável. Em resumo, se o sistema a malha aberta contém um ganho variável, K, deve-se fazer K=1, para esboçar o diagrama de Nyquist, considerando que o ponto crítico esteja em –1/K e não em –1. Ajustar o valor de K, para gerar estabilidade, com base no critério de Nyquist. Exemplo: Para um sistema com retroação unitária em que G(s)
K , s(s 3)(s 5)
determine o valor de K para a estabilidade e instabilidade.
G( j)
K 82 j(15 3 ) j( j 3)( j 5) K 1 644 2 (15 2 )2
Em =0, G(j)=-0,0356 - j. Fazendo a parte imaginária igual a zero na equação acima encontra-se 15 , que, substituído na mesma equação resulta na parte real igual a – 0,0083. Finalmente, em = G(j)=1/(j)3 = 0 -270o. Com base na Figura (4.36a), P=0; para estabilidade N deve ser igual a zero, de modo que Z=0. Neste caso, K deve ser aumentado de 1/0,083=120,5 antes do diagrama envolver o ponto –1. Portanto, para a estabilidade K<120,5 e K>120,5 para a instabilidade. Se K=120,5 o sistema é marginalmente estável. Neste ganho o gráfico intercepta –1 em 15 rad/s.
a)
b)
Fig. 4.36 – a) contorno; b) diagrama de Nyquist.
UNIDADE IV
33
2.6 Estabilidade por intermédio do mapeamento do eixo j positivo A verificação da estabilidade de um sistema pelo diagrama de Nyquist pode ser simplificado usando apenas o mapeamento do eixo j positivo. O sistema da Figura (4.37) é estável para valores baixos do ganho e instável para valores altos do ganho.
a) b) Fig. 4.37 – a) contorno e LR; b) diagrama de Nyquist. Como o contorno não envolve os pólos a malha aberta, o diagrama de Nyquist deveria envolver o ponto –1 para haver estabilidade. Pode-se ver a partir do diagrama de Nyquist que o envolvimento do ponto crítico pode ser determinado apenas com base no mapeamento do eixo j positivo. Se o ganho for pequeno o mapeamento passará a direita de –1 (sistema estável) e se for elevado passará à esquerda (sistema instável). Portanto, este sistema é estável para valores de ganho de malha, K, que garante que, a magnitude a malha aberta é menor que 1 na freqüência onde o ângulo de fase é 180o (ou, de forma equivalente, -180o). No sistema da Figura (4.38), o sistema é instável para baixos ganhos e estável para ganhos elevados.
a) b) Fig. 4.38 – a) contorno e LR; b) diagrama de Nyquist. Para este caso, o sistema é estável se a magnitude da malha aberta for maior que 1 na freqüência onde o ângulo de fase é 180o (ou, de forma equivalente, -180o). Exemplo: Determinar a faixa de valores de ganho para a estabilidade e instabilidade, para um sistema com retroação unitária dado por:
UNIDADE IV
34
G (s )
K (s 2s 2)(s 2) 2
Determine também a freqüência de oscilação em radianos. Como os pólos à malha aberta estão apenas no semiplano esquerdo, não se deseja nenhum envolvimento do ponto –1 para obter a estabilidade. Fazendo K=1 e desenhando o trecho do contorno ao longo do eixo imaginário positivo obtém-se o contorno mostrado na Figura (4.39a). Na Figura (4.39b) a interseção com o eixo real negativo é obtida fazendo s=j, e igualando a zero a parte imaginária de G(s)H(s), ou seja:
G( j) H ( j)
1 (s 2s 2)(s 2) s j 2
4(1 2 ) j(6 2 ) 16(1 2 ) 2 (6 2 )2
fazendo j(6 - 2)=0 tem-se que 6 . Este valor substituído na equação acima resulta na parte real igual a –1/20 180o.
Fig. 4.39 – a) contorno; b) diagrama de Nyquist. Este sistema é estável se a magnitude da resposta em freqüência for menor que 1 em 180o. Portanto, o sistema é estável para K<20 e instável para K>20. 2.7 Margem de ganho e de fase por intermédio do diagrama de Nyquist O conceito do ponto de vista do ganho com fase de 180 o leva às seguintes informações de margem de ganho e margem de fase. Margem de ganho, GM: é a mudança no ganho a malha abeta no ponto com fase de 180o, expressa em decibéis (dB), necessária para tornar instável o sistema em malha fechada. Margem de fase, M: é a mudança no valor da fase a malha aberta, no ponto com ganho unitário, necessária para tornar instável o sistema a malha fechada.
UNIDADE IV
35
Estas duas definições são mostradas graficamente no diagrama de Nyquist na Figura (4.40).
Fig. 4.40 – Margem de ganho e margem de fase pelo diagrama de Nyquist. Admitindo que o sistema da Figura (4.40) é estável se não houver envolvimento do ponto –1, uma diferença de ganho entre o cruzamento do diagrama de Nyquist do eixo real em –1/a e o ponto crítico –1 determina a proximidade da instabilidade do sistema. A margem de ganho é determinada pelo inverso do valor do cruzamento do eixo real expresso em dB, ou seja:
1 20 log a G M 20 log 1 a No ponto Q', onde o ganho é unitário, representa a proximidade da instabilidade do sistema. Portanto, o valor da margem de fase é . Exemplo: Determinar a margem de ganho e de fase para o sistema abaixo.
G (s ) H (s )
6 (s2 2s 2)(s 2)
6 4(1 2 ) j(6 2 ) 16(1 2 ) 2 (6 2 )2
O diagrama de Nyquist cruza o eixo real na freqüência de 6 rad/s. A parte real é calculada como sendo –0,3. Por conseguinte, o ganho pode ser aumentado de (1/0,3)=3,33 antes da parte real se tornar –1. Portanto, a margem de ganho é:
G M 20 log 3,33 10,45 dB
UNIDADE IV
36
Para a margem de fase, determina-se a freqüência na qual a magnitude é unitária:
6 4(1 2 ) j(6 2 ) 1 16(1 2 ) 2 (6 2 )2 O que resulta numa freqüência de 1,253 rad/s, cujo ângulo de fase é de –112,3o. A diferença entre este ângulo e –180o é 67,7o, que é a margem de fase. 3.0 Sistemas com Retardo Supondo um sistema G(s), cuja entrada é R(s) e uma saída C(s), e um outro sistema, G'(s), que retarda a saída por T segundos, a TL de c(t-T) é e-sTC(s), ou seja: Para um sistema sem retardo:
C(s) G(s)R(s) E com retardo
e sT C ( s) R( s)G' ( s) G' (s) e sT G(s)
(4.73) (4.74) (4.75)
Apresentando (4.67) de outra forma tem-se:
G' j e jTG( j) G( j) [T G( j)]
(4.76)
O retardo não afeta a curva de resposta em freqüência, mas reduz a linearidade aumentando a defasagem, T, a partir do diagrama de fase de G(j).
Fig. 4.41 - Efeito do retardo na resposta em freqüência A redução na defasagem causada pelo retardo reduz a margem de fase, tornando a resposta mais oscilatória e reduz a freqüência de margem de ganho, aproximando o sistema da instabilidade.
UNIDADE IV
37
Exemplo: Traçar a resposta em freqüência para o sistema abaixo com um retardo de 1 s.
G(s)
k ss 1s 10
O diagrama de Bode para módulo e fase para k=1 é mostrado na Figura abaixo, onde só o gráfico de fase é afetado pelo retardo. Primeiramente traça-se o gráfico de fase do retardo.
esT 1 T 1 Depois, traça-se o diagrama de fase para G(j), que somada com a fase de retardo dá a curva resultante. Usando uma aproximação de segunda ordem, este acréscimo na margem de fase reduz o fator de amortecimento. a) Qual é a faixa de valores de k para garantir a estabilidade? - Sistema com retardo: a fase é -180o na freqüência de 0,8 rad/s, o que corresponde a -20 dB. logo
20 log k 20 k 10
O ganho k pode ser aumentado de 10 vezes sem se tornar instável.
- Sistema sem retardo: a fase de -180o ocorre em 3 rad/s, o que corresponde à 40 dB. logo
20 log k 40 k 100
Isto mostra que o sistema com retardo fica mais próximo da instabilidade. b) Qual é a ultrapassagem para k=5?
UNIDADE IV
38
-Sistema com retardo: a curva é aumentada de 14 dB, com um ângulo de fase de -145o, na freqüência de 0,5 rad/s e uma margem de fase de 35º. Admitindo um sistema de segunda ordem e usando (4.51) tem-se:
2
tg1
0,33
2 1 4 2
Utilizando (2.20) resulta:
%UP e
1 2
4
100 33%
Resposta ao degrau do sistema com retardo De acordo com a Figura acima, o percentual de ultrapassagem é 38%. - Sistema sem retardo: A linha de cruzamento de zero dB ocorre em 0,5 rad/s, com fase de -118o e uma margem de fase de 62º De forma semelhante encontra-se 0,64 e %UP 7,3% . De acordo com a Figura abaixo o percentual de ultrapassagem é aproximadamente 5%, com um tempo de assentamento menor.
Resposta ao degrau do sistema sem retardo PROGRAMAS MATLAB 1. Esboça os gráficos de Bode de módulo e de fase G
(s 3) (s 2)(s 2 2s 25)
UNIDADE IV
39
clf % Apaga gráficos existentes na tela. numg=[1 3]; % Define o numerador de G(s). deng=conv([1 2],[1 2 25]); % Define o denominador de G(s). G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Bode . bode(G) % Constrói um gráfico de Bode. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma % legenda ao gráfico de Bode. [mag,fase,w]=bode(G); % Armazena pontos do gráfico de Bode. pontos=[20*log10(mag(:,:))',fase(:,:)',w] % Lista pontos do gráfico de Bode % com magnitude em dB. Pause 2. Faixa de valores de ganho para a estabilidade usando Bode G
k (s 2)(s 4)(s 5)
numg=1; deng=poly([-2 -4 -5]); 'G(s)' G=tf(numg,deng) [Gm,Pm,Wcg,Wcp]=margin(G);
% Define o numerador de G(s). % Define o denominador de G(s). % Exibe título. % Cria e mostra G(s). % Obtém as margens de % ganho e de fase % e as freqüências correspondentes. % Mostra o valor de K para estabilidade.
K=Gm Pause
3. Traçar o diagrama de Bode com retardo
G
k s(s 1)s 10)
Retardo de 1s
clf % Apaga gráficos existentes na tela. hold off % Desativa a função hold. numg=1; % Define o numerador de G(s). deng=poly([0 -1 -10]); % Define o denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). w=0.01:0.1:10; % Faz 0,01<w<10 em incrementos de 0,1. [magg,faseg]=bode(G,w); % Coleta dados dos diagramas % de Bode de G(s). [numd,dend]=pade(1,6); % Representa o retardo. Gd=tf(numd,dend); % Cria e mostra o retardo, % Gd(s). [magd,fased]=bode(Gd,w); % Coleta dados dos diagramas % de Bode de Gd(s). Ge=Gd*G; % Forma Gd(s)G(s). [mage,phasee]=bode(Ge,w); % Coleta dados dos diagramas % de Bode de Gd(s)G(s). subplot(2,1,1) % Subdivide a área para plotar o gráfico 1.
UNIDADE IV
40
semilogx(w,20*log10(mage(:,:))) % Plota a curva de magnitude. grid on % Ativa a grade para o gráfico de magnitude. axis([0.01,10,-80,20]); % Limita os eixos do gráfico de Bode. title('Magnitude da Resposta com Retardo') % Adiciona legenda % a resposta em magnitude. xlabel('Freqüência (rad/s)') % Rotula o eixo x da magnitude % da resposta. ylabel('20log M') % Rotula o eixo y eixo da magnitude. subplot(2,1,2) % Subdivide a área do gráfico para o gráfico 2. semilogx(w,faseg(:,:),w,fased(:,:),w,fasee(:,:))% Plota as % curvas de fase de G(s), % Gd(s), e G(s)Gd(s) em um único gráfico. grid on % Ativa a grade para o gráfico de fase. axis([0.01,10,-900,0]); % Limita os eixos do gráfico de Bode. title('Resposta de Fase com Retardo') % Adiciona legenda à % curva de fase. xlabel('Freqüência (rad/s)') % Rotula o eixo x da % resposta de fase. ylabel('Fase (graus)') % Rotula o eixo y eixo da % resposta de fase. text(1.5,-50,'Retardo') % Gera dístico para identificar % a curva de retardo. text(4,-150,'Sistema') % Gera dístico para identificar % a curva Sistema . text(2.7,-300,'Total') % Gera dístico para identificar % a curva Total. pause 4. Projeta a resposta transitória por meio de ajuste do ganho
Valor requerido: %U=9,5% clf % Apaga gráficos existentes na tela. numg=[100]; % Define o numerador de G(s). deng=poly([0 -36 -100]); % Define o denominador de G(s). G=tf(numg,deng) % Cria e mostra G(s). up=input('Digite %UP '); % Entre com o valor desejado % de ultrapassagem percentual. z=(-log(up/100))/(sqrt(pi^2+log(up/100)^2)); % Calcula a relação de % amortecimento necessária. Pm=atan(2*z/(sqrt(-2*z^2+sqrt(1+4*z^4))))*(180/pi); % Calcula a margem de fase necessária. w=0.01:0.01:1000; % Ajusta a faixa de freqüências de 0,01 a % 1000 em incrementos de 0,01. [M,P]=bode(G,w); % Coleta os dados de Bode.
UNIDADE IV
41
Ph=-180+Pm; % Calcula o ângulo de fase necessário. for k=1:1:length(P); % Busca nos dados de Bode o % ângulo de fase % necessário. if P(k)-Ph<=0; % Se o ângulo de fase requerido for encontrado, % obter o valor da M=M(k); % magnitude na mesma freqüência. 'Valor requerido de K' % Exibe título. K=1/M % Calcula o ganho requerido. break % Interrompe o laço. end % Fim de if. end % Fim de for. T=feedback(K*G,1); % Obtém T(s) usando o valor calculado de K. step(T) % Gera uma resposta ao degrau . title(['Resposta ao Degrau a Malha Fechada para K= ',num2str(K)]) % Adiciona legenda à resposta ao degrau. Pause 5. Plota o diagrama de Nyquist clf % Apaga gráficos existentes na tela. numg=[1 2]; % Define numerador de G(s). deng=[1 0 0]; % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói o gráfico de Nyquist. title('Resposta de Freqüência a Malha Aberta') w=0:0.5:10; % Faz 0<w<10 em incrementos de 0,5. [re,im]=nyquist(G,w); % Obtém pontos do gráfico de Nyquist % uma faixa de valores de w. pontos=[re(:,:)',im(:,:)',w'] %Lista pontos especificados em %uma faixa de valores do gráfico de Nyquist. Pause 6. Determina a margem de ganho e de fase clf % Apaga gráficos existentes na tela. numg=6; % Define numerador de G(s). deng=conv([1 2],[1 2 2]); % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói um diagrama de Nyquist. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma legenda ao diagrama de Nyquist. [Gm,Pm,Wcg,Wcp]=margin(G);%Obtém as margens de ganho e de fase % e as freqüências correspondentes. 'Margem de Ganho(dB); Margem de Fase(graus); freqüência de 180 graus (rad/s);' 'freqüência de 0 dB (rad/s)' % Exibe título.
UNIDADE IV
42
margens=[20*log10(Gm),Pm,Wcg,Wcp] % Exibe os dados de margens. Pause 7. Calcula a faixa de ganho pelo diagrama de Nyquist clf % Apaga gráficos existentes na tela. numg=[1 2]; % Define numerador de G(s). deng=[1 0 0]; % Define denominador de G(s). 'G(s)' % Exibe título. G=tf(numg,deng) % Cria e mostra G(s). grid on % Ativa a grade para o gráfico de Nyquist. nyquist(G) % Constrói o gráfico de Nyquist. title('Resposta de Freqüência a Malha Aberta') % Adiciona uma legenda ao gráfico de Nyquist. w=0:0.5:10; % Faz 0<w<10 em incrementos de 0,5. [re,im]=nyquist(G,w);%Obtém pontos do gráfico de Nyquist para % uma faixa de valores de w. pontos=[re(:,:)',im(:,:)',w'] % Lista pontos especificados em %uma faixa de valores do gráfico de Nyquist. pause numg=1; % Define o numerador de G(s).
EXERCÍCIOS
4.1 - a) Determinar as expressões analíticas para magnitude e a fase da resposta em frequência de:
G (s) b)
1 (s 2)(s 4)
Construa os gráficos logarítmicos de magnitude e de fase usando o logaritmo da frequência em rad/s como abcissa.
4.2 - Construir os gráficos logarítmicos de magnitude e de fase de Bode da Figura abaixo onde: (s 20) G(s) (s 10)(s 7)(s 50)
4.3 - Para o sistema da Figura abaixo onde: G(s)
k (s 5)(s 20)(s 50)
UNIDADE IV
43
a) Desenhe os gráfico logarítmicos de Bode de módulo e fase; b) A partir do diagrama de Bode, encontre as faixas de valores de k para manter o sistema estável; c) Calcule a margem de ganho, a margem de fase, a frequência de zero dB e a fase de 180o a partir do diagrama de Bode para k=10.000. 4.4 -
Determinar a constante de erro estático para um sistema com retroação unitária, estável, cuja FT em malha aberta, tem o diagrama de módulo de Bode mostrado na Figura abaixo.
4.5 - Para o sistema da Figura abaixo, onde: G (s)
10 s(s 1)
Determine a margem de fase quando há um retardo no percurso direto de 0s, 3s e 7s. 4.6 - Estimar G(s) cujos gráficos de módulo e de fase, de Bode, são mostrados na Figura abaixo.
UNIDADE IV
44
4.7 - Para o sistema com retroação unitária com a seguinte FT:
G (s)
k s(s 50)(s 120)
Use as técnicas de resposta em frequência (diagrama de Bode) para obter o ganho k para uma resposta ao degrau unitário com 20% de ultrapassagem. 4.8 Esboçar o diagrama de Nyquist para o sistema mostrado na Figura abaixo.
G (s )
1 (s 2)(s 4)
4.9 Para o sistema do exercício 4.8, onde:
G (s )
K (s 2)(s 4)(s 6)
a) Plote o diagrama de Nyquist; b) Determine a faixa de valores de ganho, K, para estabilidade. 4.10 Determinar a margem de ganho e a freqüência de 180 o do Exercício 4., para K=100. s 2 2s 1 4.11 Para o sistema com retroação unitária: G(s) 3 . Plote o s 0,2s 2 2s 1 diagrama de Nyquist e examine a estabilidade do sistema a malha fechada. 4.12 - Considere o sistema com retroação unitária, cuja FT de malha aberta é:
G (s)H(s)
ke Ts s(s 1)
Determine, em função do tempo morto T, o máximo valor de k para que haja estabilidade.
UNIDADE IV
45
Related Documents
Abc Da Saude - Iv
February 2021 0
44
January 2021 3
Cotrim, Gilberto - Fundamentos Da Filosofia (unidade 1)
February 2021 0
No, No Fui Yo. Ivar Da Coll
January 2021 0
(wydawnictwo Militaria No.44) M3 Stuart
February 2021 2
Unidade 5
March 2021 0More Documents from "cachito25"

Notas_de_aula_da_unidade_i.pdf
January 2021 1

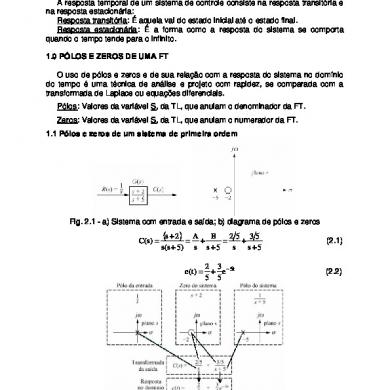
Notas_de_aula_da_unidade_ii.pdf
January 2021 1
