Notas_de_aula_da_unidade_i.pdf
This document was uploaded by user and they confirmed that they have the permission to share it. If you are author or own the copyright of this book, please report to us by using this DMCA report form. Report DMCA
Overview
Download & View Notas_de_aula_da_unidade_i.pdf as PDF for free.
More details
- Words: 9,064
- Pages: 46
Loading documents preview...
UNIDADE I
46 páginas
1.0 SISTEMAS DE CONTROLE O que é um sistema? O que é um sistema de controle? O termo sistema é usado para descrever uma série de componentes que interagem para realizar uma determinada função. O aspecto importante de um sistema é a relação entre as entradas e as saídas.
Fig. 1.1 - Blocos representativos de sistemas As relações entre as saídas e as entradas de alguns sistemas podem ser similares:
Fig. 1.2 - Circuito elétrico RC
Fig. 1.3 - Sistema de aquecimento
a)
b)
Fig. 1.4 - a) Tensão no capacitor b) temperatura no recipiente Em alguns casos é conveniente dividir um sistema em vários subsistemas acoplados.
UNIDADE I
2
Fig. 1.5 - Vários subsistemas acoplados Em um sistema de controle, a saída é controlada para ter um valor específico ou variar de forma determinada pela entrada do sistema. . sistemas em malha aberta . sistemas em malha fechada Em um sistema em malha aberta, a entrada é escolhida com base na experiência.
Fig. 1.6 - Sistema em malha aberta Em um sistema em malha fechada, um sinal é realimentado da saída para a entrada, para manter a saída constante, mesmo havendo modificações nas condições de operação.
Fig. 1.6a - Diagrama de blocos em malha fechada Elementos básicos de um sistema em malha aberta Elemento de controle: determina a ação que deve ser tomada visando a entrada do sistema de controle;
UNIDADE I
3
Elemento de correção: responde ao sinal de saída do sinal de controle e age de forma a levar a variável controlada ao valor desejado; Processo ou planta: sistema no qual uma variável é controlada.
Fig. 1.7 - Diagrama de blocos de um sistema em malha aberta
Fig. 1.8 - Sistema de controle de temperatura em malha aberta
Fig. 1.9 - Diagrama de blocos de um sistema em malha fechada
UNIDADE I
4
Fig. 1.10 - Sistema de controle de temperatura em malha fechada Controle de velocidade de um motor elétrico
Fig. 1.11 - Sistema de controle de um motor de CC em malha fechada Controle de direção e velocidade de um automóvel
Fig. 1.12 - Sistema de controle de direção e velocidade de automóvel
UNIDADE I
5
2.0 TRANSFORMADA DE LAPLACE A transformada de Laplace é um método de transformar equações diferenciais em equações algébricas mais facilmente solucionáveis. Através da transformada de Laplace é possível converter senóides, exponenciais, etc.., em funções algébricas de uma variável complexa "S".
[f ( t )] f ( t )e st dt F(s)
Definição:
o
Exemplo: Uma resistência elétrica é percorrida por uma corrente que varia no tempo: v( t ) Ri( t )
logo:
v(t )e o
st
dt Ri (t )e o
st
(1.1) V (s) RI (s)
dt
(1.2)
Função degrau
f ( t ) 1 f (t ) 0
para t>0 para t<0
f (t ) a f ( t ) 0
para t>0 para t<0
1s
1 F(s) 1.estdt e st o s
então:
o
(1.3)
Se a função degrau tem amplitude "a" tem-se: a F (s ) s
(1.4)
f (t ) e at
(1.5)
Função exponencial
1 1 F(s) eat e stdt e ( s a ) t o o s a s a
2.1 Regras básicas
f1 (t ) f 2 ( t ) F1 (s) F2 (s) f1 (t ) f2 ( t ) F1 (s) F2 (s)
(1.6)
UNIDADE I
6 a .f (t ) a.F(s)
f ( t T ) e sT F(s) d f ( t ) s.F(s) f (0) dt
d 2f ( t ) df (0) s2 F(s) sf (0) 2 dt dt d n f ( t) dt n
n
s n F(s) sn k f k 1 (0) k 1
f (t )
onde:
k 1
d k 1f (t ) k 1 dt
Tab. 1.1 - Transformadas de Laplace Exemplo: Determinar a transformada de Laplace das seguintes funções: a) t 2 e at
b) t 2 (1 eat )
a) Consultando uma Tabela tem-se:
UNIDADE I
7
n! t n e at p/ (n=1,2,3...) F(s) (s a ) n 1 2! 2 2 1 (s a ) (s a ) 3
t 2 (1 e at ) t 2 t 2 e at
b)
Consultando uma Tabela Tem-se: n! 2 2 f (t ) t F(s) n 1 3 s s
2 f ( t ) t 2 eat F(s) (s a )3 2 2 F(s) 3 s (S a ) 3
e
Transformada de Laplace de uma equação diferencial 3
3
dx( t ) 2x ( t) 4 dt
dx( t ) 3[sX (s) x (0)] dt
2 x( t ) 2X (s )
se
x (0) 0
e
4
4 s
4 3[sX (s) 0] 2X(s) s
4 X (s) 2 3s 2s
Quando um termômetro é inserido em um líquido a uma temperatura Ti , a temperatura lida na saída T o é dada pela seguinte equação diferencial: k
dTo (t ) Ti To ( t ) dt
dTo ( t ) sTo (s) com dt
logo:
To (0) 0 e Ti
T T (s ) 1 ksTo (s) i To (s) o s Ti s(ks 1)
(1.7) Ti s
(1.8)
UNIDADE I
8
2.2 Transformada Inversa de Laplace A transformada inversa de Laplace é definida por: 1 c j 1 st [F(s)] f ( t ) F(s) e ds, 2 cj
para t 0
(1.9)
Esta equação é complicada, por isso, seu uso não é recomendado para obter a transformada inversa. Se a transformada não está na forma reconhecível na tabela, recorre-se às frações parciais. Se F(s) for decomposta em componentes:
F(s) F1 (s) F2 (s) ....Fn (s)
(1.10)
e se as transformadas inversas estiverem disponíveis, então: 1 1 1 1 [ F(s)] [F1 (s)] [F2 (s)] ..... [ Fn (s)]
f1 ( t ) f2 ( t) .... f n ( t )
(1.11)
Exemplo: A transformada inversa de Laplace para: 3 3 X (s ) 2 s 2s s(s 2) Consultando uma tabela tem-se: 1 1 (1 e at ) s(s a ) a
onde a = 2
3 x (t ) (1 e 2 t ) 2
logo:
O processo de converter uma expressão algébrica em frações simples é chamado de decomposição em frações parciais. Os três tipos básicos de frações parciais: 1. Fatores lineares no denominador; Expressão:
Fração parcial:
f (s) (s a )(s b)(s c)
(1.12)
A B C (s a ) (s b ) (s c)
(1.13)
UNIDADE I
9
2. Fatores lineares repetidos no denominador;
f (s ) (s a ) n
Expressão:
Fração parcial:
(1.14)
A B N .... (s a ) (s a )2 (s a ) n
(1.15)
3. Fatores quadráticos no denominador, quando o fator tem raízes complexas conjugadas. f (s )
Expressão:
(1.16)
2
s bs c
As B
Fração parcial:
(1.17)
as bs c 2
Se existe um fator linear no denominador:
f ( t) (as bs c )(s d)
Expressão:
2
As B C 2 as bs c (s d)
Fração parcial: Exemplo:
s 5 s 5 A B s2 3s 2 (s 1)(s 2) s 1 s 2 A(s 2) B(s 1) (s 1)(s 2) A (s 2) B(s 1) s 5 ( A B)s s
logo
B 3
e e
2A B 5
A 4
s 5
4 3 s 3s 2 s 1 s 2
logo:
2
Exemplo: Encontrar a solução da seguinte equação diferencial:
(1.18)
(1.19)
UNIDADE I
10 x2 x5 x 3,
x( 0) 0 e
x(0) 0
A transformada de Laplace conduz a: 3 s 2X(s) 2sX (s) 5X(s) s
Resolvendo para X(s) tem-se:
3 3 3 2 3 s 1 X (s ) 2 2 2 5 (s 1)2 22 s(s 2s 5) 5s 10 (s 1) 2 A transformada de Laplace inversa é: 1 x( t ) [ X(s)]
3 1 s 1 3 1 1 3 1 2 5 s 10 (s 1) 2 2 2 5 (s 1) 2 2 2 3 3 3 e t sen 2t e t cos 2 t , 5 10 5
para t 0
Tab. 1.2 - Teoremas da transformada de Laplace
UNIDADE I
11
Expressões em frações parciais com o Matlab Exemplo: Converter em frações parciais a seguinte expressão: B(s) 2s3 5s 2 3s 6 A(s) s3 6s2 11s 6 Comandos: NUM=[2 5 3 6] e DEN=[1 6 11 6] [r,p,k]=residue(NUM,DEN) resultados r = -6.00/-4.00/3.00; p = -3.00/-2.00/-1.00
k=2
B(s) 6 4 3 2 A(s) s 3 s 2 s 1 O comando [NUM,DEN]=residue(r,p,k) efetua o processo inverso. 3.0 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS É um conjunto de equações que representam a dinâmica do sistema e que pode ser descrito por equações diferenciais. Sistemas Lineares - Quando é possível aplicar o princípio da superposição. Sistemas não-lineares - não se aplica o princípio da superposição.
Fig. 1.13 - a) função linear; b) função não-linear 3.1 Modelagem matemática de um sistema massa-mola Determinar o modelo matemático do sistema massa-mola mostrado na Figura (1.14).
UNIDADE I
12
Fig. 1.14 - Sistema massa-mola A equação dinâmica do sistema é: ma f kx cv m
f m
d 2x dt
2
c
d2 x
(1.20)
dt 2
dx kx dt
(1.21)
Na ausência de amortecimento a massa "m" oscilará com uma frequência natural k n . m
é:
E a razão de amortecimento
c 2 mk
1 d2 x
logo:
2n 1 2n
dt
2
(1.22)
2dx x f / k n dt
2 s 2 X(s) sX(s) X(s) F(s) / k n F(s) / k
X(s)
2
2
F(s)n / k 2 2 s 2n s n
2 s 1 2 n n Se f for respectivamente, um impulso e um degrau unitários tem-se: s
1 x( t ) n e n t sen(n t 1 2 ) k 1 2 1 x( t ) 1 n e n t sen(n t 1 2 ) k 1 2
(1.23)
(1.24)
(1,24a)
UNIDADE I
3.2
13
Modelagem matemática de um motor de corrente contínua com o campo constante
Fig.1.15 - Diagrama esquemático de um motor de CC e a (t ) vb ( t ) L a v b (t ) k b
onde:
di a R a i a dt
dm ( t ) dt
E a (s) Vb (s) L a sIa (s) R a Ia (s)
ou
Vb (s) k bsm (s)
onde:
(1.25)
(1.26)
(1.27)
(1.28)
Substituindo (1.28) em (1.27), tem-se: E a (s) k b sm (s) L asIa (s) R a Ia (s)
(1.29)
O torque no eixo do motor é dado por: Tm (t ) k t i a (t )
ou
Tm (s) k t Ia (s)
(1.30)
onde k t é a constante de torque A Figura (1.16) mostra um carregamento típico de um motor, onde Jm e Dm são a inércia e o amortecimento viscoso equivalentes referidos ao eixo do motor.
Fig. 1.16 - Carregamento mecânico típico de um motor logo:
Tm (s) J ms 2 Dm s m (s)
(1.31)
UNIDADE I
14
Substituindo (1.30 e 1.31) em (1.29) resulta:
R a L as Jm s2 D msm (s)
E a (s) k b sm (s)
(1.32) kt Admitindo que a indutância de armadura é muito menor que a resistência tem-se: R J s D m sm (s) E a (s ) a m kt
(1.33)
A função de transferência desejada é: m (s) kt RaJ m E a (s ) 1 kk s s Dm t b Ra Jm
(1.34)
ou m (s) k E a (s ) s s a
(1.35)
A Figura (1.17) mostra um motor de inércia J a e de amortecimento Da acionando uma carga de inércia J L e de amortecimento DL.
Fig. 1.17 - Motor mais carga A inércia e o amortecimento referidos à armadura são: 2
N1 Jm Ja J L N 2
2
e
N1 Dm Da DL N 2
(1.36)
Substituindo (1.30) em (1.29) e fazendo La = 0 tem-se: R E a (s) a Tm (s) k b sm (s) kt
(1.37)
Aplicando a transformada de Laplace inversa resulta: R ea (t ) a Tm (t ) k b m (t ) kt
(1.38)
UNIDADE I
15
Para o motor operando em estado estacionário o torque Tm é dado por: k k k Tm b t m t e a Ra Ra
Estudo de caso
Fig. 1.18 - Sistema de controle de posicionamento de uma antena
Fig. 1.18 - Diagrama esquemático do sistema de controle
Fig. 1.19 - Diagrama de blocos do sistema de controle
(1.39)
UNIDADE I
16
Tab. 1.3 - Parâmetros do sistema Potenciômetro de entrada Desprezando a dinâmica do potenciômetro, a relação entre a tensão de saída e o deslocamento angular de entrada é: Vi (s) 10 1 i (s) 10
Pré-amplificador Supondo que não há saturação, e que a dinâmica é desprezada, a relação entre a tensão de entrada e de saída é: Vp (s) K Vi (s) Amplificador de potência Considerando a dinâmica do amplificador de potência, devido este ser muito mais lento do que o pré-amplificador tem-se: E a (s ) 100 Vp (s) s 100 Motor mais carga A inércia total com relação ao eixo do motor é: 2
25 1 J m Ja JL 0.03 0.02 1 100 250 O coeficiente de amortecimento Dm , equivalente ao eixo de armadura é: 2 1 25 Dm Da D L 0.01 1 0.02 100 250
onde DL é o coeficiente de amortecimento viscoso referido a 0.
UNIDADE I
17
A função de transferência, que relaciona o deslocamento angular do eixo da armadura e a tensão de armadura é dada por: m K t ( R a Jm ) 2,083 Ea 1 s s 1,71 KK s s Dm t b Ra Jm
onde Kt é a constante de torque; Ra a resistência de armadura e Kb a constante de velocidade.
Fig. 1.20 - Resposta do sistema para dois ganhos distintos do controlador 4.0
DIAGRAMA DE BLOCOS
Para mostrar as funções desempenhadas por cada componente de um sistema de controle, costuma-se usar um diagrama chamado "Diagrama de blocos". Elemento de um diagrama de blocos
Ponto de soma
UNIDADE I
18
Ponto de distribuição
Diagrama de blocos a malha aberta
Fig. 1.21 - a) blocos separados; b) bloco equivalente Diagrama de blocos de um sistema a malha fechada
Fig. 1.22 - Sistema em malha fechada Função de transferência de ação direta. C(s) G2 (s)G3 (s) E (s )
FTAD
(1.40)
Função de transferência a malha aberta B(s) G 2 (s) G3 (s)H1 (s)H2 (s) E(s)
FTMA
(1.41)
Função de transferência a malha fechada C(s) G 2 (s)G 3E (s) G(s)E (s)
(1.42)
H(s) H1 (s)H 2 (s)
(1.43)
UNIDADE I
19
Fig. 1.23 - Diagrama de blocos equivalente E(s) R (s) B(s) R (s) H (s)C(s)
(1.44)
Eliminando E(s) tem-se: C(s) G (s)[ R(s) H (s)C(s)]
C(s) G (s ) R (s) 1 G(s)H(s)
(1.45) FTMF
(1.46)
Fig. 1.24 - Diagrama de blocos equivalente Sistema a malha fechada sujeito a uma perturbação
Fig. 1.25 - Diagrama de blocos com perturbação Neste caso, aplica-se o princípio de superposição. Fazendo R(s) =0, tem-se:
CD (s) G 2 (s)[ D(s) G1 (s)H(s)C D (s)]
(1.47)
G 2 (s) D(s) G 2 (s)G1 (s) H(s) CD (s) CD (s)[1 G 2 (s) G1 (s)H(s)] G 2 (s) D(s)
CD (s ) G 2 (s) D(s) 1 G 2 (s) G1 (s)H(s)
(1.48)
UNIDADE I
20
Fazendo D(s) = 0, tem-se: C R (s ) G1 (s)G 2 (s) R (s) 1 G1 (s)G2 (s)H(s)
(1.49)
logo:
C(s) C D (s) C R (s) G 2 (s ) [G1 (s)R (s) D(s)] 1 G1 (s)G2 (s)H(s)
G1 (s)H(s) 1 e
se
(1.50)
G1 (s) G2 (s)H(s) 1
CD (s) é quase zero e os efeitos do distúrbio podem ser suprimidos. D (s ) Esta é uma vantagem dos sistemas a malha fechada
a FTMF
Neste caso, se
CR (s) 1 R (s) H(s) H (s) 1 C(s) R (s)
Exemplo: Simplificar o seguinte diagrama de blocos
Fig. 1.26 - Diagrama de blocos de um sistema
X1 CH2 G1 H1G 2 X1 RG1 CG1 X1 (1 G1G 2 H1 ) CH2 CG1 RG1 C(H 2 G1 ) RG1 X1 1 G1G 2 H1 C G 2 G3 X1 G 2G 3
C( H2 G1 ) RG 1 1 G1 G2 H1
C[1 G1G 2 H1 G2 G3 (G1 H 2 )] G1G 2 G3R
(1.51)
UNIDADE I
21 C G1G2 G 3 R 1 G1G 2 H1 G1 G2 G3 G 2 G3 H2
Fig. 1.27 - Diagrama de blocos equivalente Note-se que o numerador da FTMF é o produto das FT do percurso de ação direta e o denominador é igual a:
(produto das FT ao longo de cada malha)
1
5.0 REPRESENTAÇÃO NO ESPAÇO DE ESTADO Estado: O estado de um sistema dinâmico é o menor conjunto de valores de variáveis, chamadas variáveis de estado. Variáveis de estado: são as grandezas cujo conjunto de valores determina o estado do sistema (descrevem completamente o comportamento dinâmico do mesmo). Vetor de estado: são as variáveis de estado representadas por um vetor. Espaço de estado: o espaço n-dimensional cujos eixos coordenados consistem nos eixos x 1,x2,...xn é chamado espaço de estados (qualquer estado pode ser representado por um ponto no espaço de estados). A análise no espaço de estado envolve três tipos de variáveis: variáveis de entrada, de saída e de estado, conhecidas para t=to e t tº O número de variáveis de estado necessárias na definição completa da dinâmica de um sistema é igual ao número de integradores envolvidos. Circuito RL
Fig. 1.28 - Circuito elétrico com uma indutância e uma resistência em série Escrevendo a equação do circuito tem-se: L
di Ri v(t ) dt
(1.52)
A transformada de Laplace é: L[sI (s) i(0)] RI (s) V (s)
Admitindo que a entrada v(t) é um degrau unitário tem-se:
(1.53)
UNIDADE I
22 1 1 1 I (s) R s s R L
i (0) R s L
(1.54)
logo: 1 L t i(0) e L t i (t ) 1 e R R
R
(1.55)
onde i(t) é um subconjunto de todas as variáveis possíveis do circuito e pode ser determinada se v(t) e i(0) forem conhecidos. Neste caso, i(t) é uma variável de estado e (1.52) é uma equação de estado. As outras variáveis são:
vR ( t ) Ri (t )
(1.56)
vL ( t ) v( t ) Ri ( t)
(1.57)
di 1 [v (t ) Ri (t )] dt L
(1.58)
e
A Equação (1.52) combinada com (1.56 e 1.58) formam uma representação no espaço de estados. A Equação (1.52) não é única. Poderia ter sido escrita em termos de qualquer outra variável do circuito. v Por exemplo: fazendo i R em (1.52) resulta: R L dv R v R v( t ) R dt
que pode ser resolvida conhecendo-se a condição inicial:
v R (0) Ri( 0) e v(t ) Circuito RLC
Fig. 1.29 - Circuito RLC série
(1.59)
UNIDADE I
23
A equação do circuito é: di 1 Ri idt v( t) dt C dq Expressando em função da carga e usando i (t ) tem-se: dt 2 d q dq 1 L 2 R q v(t ) dt C dt
L
(1.60)
(1.61)
A Equação (1.61) pode ser representada por duas equações diferenciais de primeira ordem, simultâneas, em termos de i(t) e q(t), escolhidas como variáveis de estado, que são as seguintes: dq (t ) i (t ) dt
(1.62)
di ( t) 1 R 1 q( t ) i (t ) v (t ) dt LC L L
(1.63)
As Equações (1.62 e 1.63) são as equações de estado e podem ser resolvidas para obter q(t) e i(t) se q(0), i(0) e v(t) são conhecidas. Com base em (1.62 e 1.63) pode-se calcular todas as outras variáveis do circuito: 1 vL ( t ) q( t ) Ri( t ) v(t ) C
(1.64)
vR ( t ) Ri (t )
(1.65)
1 vC ( t ) q (t ) (1.66) C As Equações (1.62 e 1.63), combinadas e a equação de saída (1.64), constituem uma representação no espaço de estados. Uma outra escolha de variáveis de estado pode ser feita, por exemplo, com vR (t) e vc (t). Atenção! Nenhuma das variáveis de estado pode ser escrita como combinação linear das outras variáveis de estado. As variáveis de estado devem ser linearmente independentes. Se o sistema for linear, as equações de estado (1.62) e 1.63) podem ser escritas na forma matricial: x ( t ) Ax ( t) Bu( t )
onde
dq x ( t ) dt ; di dt
0 A 1 LC
(1.67) 1 R ; LC
UNIDADE I
24
q x ( t) ; i
0 B 1 e L
u( t ) v( t )
A Equação de saída (1.64), pode ser escrita da seguinte forma: y Cx Du (t )
1 C C
onde:
- R ;
D 1
(1.68) e u (t ) v(t )
O circuito analisado representa um sistema com uma única entrada e uma única saída, nos quais y, D e u são grandezas escalares. Análise de um sistema com múltiplas entradas, múltiplas saídas e n integradores:
u1 (t ), u 2 (t ),.......u r ( t ) y1 ( t ), y 2 ( t ),........ym (t )
variáveis de entrada
(1.69)
variáveis de saída
(1.70)
Definindo as n variáveis do sistema dos integradores como variáveis de estado com valores: x1 (t),x2(t),....,xn (t). O sistema pode ser descrito por:
x 1 (t ) f1 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 2 ( t ) f 2 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) : : x n (t ) f n (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t )
(1.71)
y1 ( t ) g1 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y2 ( t) g 2 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) : : ym (t ) g m ( x1 , x 2 ,..., xn ; u1 , u 2 ,..., u r ; t)
(1.72)
Definindo-se: f1 ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 1 (t ) f2 ( x1, x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 2 (t ) , f ( x , u , t ) x (t ) : x n (t ) fn (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t
(1.73)
UNIDADE I
25 g1 ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y1 ( t) g2 ( x1, x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y 2 (t ) , g ( x , u , t ) y( t ) : y n (t ) gn ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t u1 ( t ) u (t ) u( t ) 2 : u n ( t ) x(t ) f ( x, u , t )
e
e
(1.74)
(1.75)
y(t ) g (x, u, t )
x ( t ) A ( t) x (t ) B(t ) u( t )
(1.76)
y( t ) C(t ) x( t ) D( t )u (t )
(1.77)
onde A (t ) é a matriz de estado, B( t ) é a matriz de entrada, C(t ) é a matriz de saída e D( t ) é a matriz de transição direta. Se as matrizes A,B,C,D independem do tempo (constantes), o sistema é dito invariante no tempo. x(t ) Ax ( t ) Bu( t )
(1.78)
y (t ) Cx (t ) Du ( t )
(1.79)
Na Figura (1.30) tem-se a representação das Equações (1.76 e 1.77), sob a forma de diagrama de blocos.
Fig. 1.30 - Diagrama de blocos na forma de espaço de estado Exemplo: Admita-se que o sistema da Figura (1.31) seja linear e que a força u(t) seja a entrada do sistema. O deslocamento y(t) é medido a partir da posição de equilíbrio, na ausência da força externa.
UNIDADE I
26
Fig. 1.31 - Sistema mecânico A equação do movimento é: m ybyky u
Como o sistema é de Segunda ordem, o mesmo envolve dois integradores. Definindose as variáveis de estado como x1(t) e x 2(t), tem-se:
x1 ( t ) y( t ) e
x 2 (t ) y ( t) logo: e
x 1 x 2 1 1 k b 1 x2 ky b y u x1 x 2 u m m m m m
Sob a forma matricial tem-se: 0 1 0 x x1 1 b 1 u k x2 - x2 m m m
e
y 1
x1 0 x2
A Figura (1.32) mostra o diagrama de blocos do sistema mostrado na Figura (1.31).
Fig. 1.32 - Diagrama de blocos
UNIDADE I
27
Correlação entre função de transferência e equações no espaço de estados Considere-se o sistema cuja função de transferência é dada por: Y (s ) G(s) U (s )
(1.80)
que pode ser representado no espaço de estados pelas seguintes equações: x(t ) Ax ( t ) Bu( t )
(1.81)
y (t ) Cx (t ) Du ( t )
(1.82)
onde x(t) é o vetor de estado, u(t) é a entrada e y(t) é a saída. A transformada de Laplace das Equações (1.81 e 1.82) é: sX (s) x (0) AX(s) BU (s)
(1.83)
e Y (s) CX (s) DU (s)
(1.84)
Admitindo que X(0)=0, tem-se: sX (s) AX(s) BU (s)
(1.85)
(sI A )X (s) BU (s)
(1.86)
Multiplicando a esquerda de ambos os membros por (sI A) 1 :
X(s) (sI A)1 BU(s)
(1.87)
Substituindo (1.87) em (1.84) resulta:
Y(s) C(SI A)1 B D U(s) onde
(1.88)
G (s) C(SI A)1 B D Q (s ) G (s) sI A
onde Q (s) é um polinômio em S e sI A é o polinômio característico de G(s). Exemplo: Considere o sistema da Figura (1.31):
G(s) C(SI A)1 B D
(1.89)
UNIDADE I
28 s 0 0
1
s 0 k m
1
s k m
0 0 k s m
1
1 b - m 1
- 1 b s m
1
0 1 m
-1 1 b s s 2 b s k m m m
G(s) 1
1 0 b k s2 s m m
0 1 0 m
b s m k m
b s m k m
1 s
1 0 1 s m
1 2 ms bs k
Representação de sistemas dinâmicos excitação n
no espaço de estados sem derivadas de
n 1
ya1 y ... a n 1 ya n y u ( n 1)
x1 y; x 2 y ; ........; x n y x 1 x 2 ;
x2 x 3 ; ..........; xn -1 x n
x a n x1 a n 1 x 2 ....... a1 x n u n onde: 0 1 x1 0 0 x 2 x ; A : : : 0 0 xn - a n - a n -1
0 ... 0 0 1 ... 0 0 : : ; B : 0 0 0 - a n -2 ... - a1 1
(190)
UNIDADE I
29 x1 x2 y 1 0 ... 0 : xn
A Figura (1.33) mostra a realização dessas equações na forma de diagrama de blocos.
Fig. 1.33 - Diagrama de blocos do sistema representado por (1.90) Na forma de função de transferência
Y (s ) 1 n U(s) s a 1sn 1 ... a n 1s a n Representação de sistemas dinâmicos excitação n
n 1
no espaço de estados com derivadas de
n
(n 1)
y a1 y .. a n 1ya n y b o ub1 u .. b n 1ubn u
x 1 x 2 ;
(1.91)
(1.92)
x2 x 3 ; ..........; xn -1 x n
x a n x1 a n 1 x 2 ....... a 1x n n n
(n 1)
b o u b1 u ..... b n 1ubn u Para eliminar as derivadas da excitação do segundo membro as n variáveis são definidas da seguinte forma: x1 y o u x 2 yo u1u x 1 1u x 3 yo u1 u2 u x2 2 u (n 1)
(n 1)
(n 2 )
x n y o u 1 u .. n 2 un 1u xn 1 n 1 u
Substituindo (1.93) em (1.92) tem-se:
(1.93)
UNIDADE I
30 o b o 1 b1 a 1o 2 b2 a 11 a 2o n b n a 1n 1 ... a n 11 a n o
(1.94)
Solução das equações de estado no domínio do tempo Admita-se, primeiramente, a equação de estado homogênea na forma: x( t) Ax (t )
(1.95)
A solução pode ser dada pela seguinte série: x( t ) bo b1t b2 t 2 .... bk t k b k 1 t k 1 ...
(1.96)
Substituindo (1.96 em 1.95), tem-se:
b1 2b 2 t ... kbk t k 1 ( k 1)b k 1 t k ...
A bo b1t b2 t 2 ... bk t k bk 1 t k 1 ...
(1.97)
Igualando os coeficientes semelhantes resulta: b1 Abo
(1.98)
1 1 2 b2 Ab 1 A bo 2 2
(1.99)
1 k bk A b o k!
1 A k 1 b0 k 1 !
bk 1
(1.100) (1.101)
Substituindo (1.98, 1.99, 1.100 e 1.101 em (1.96) tem-se: 1 1 x (t ) b o Ab o t A2 b o t 2 ... Ak bo t k 2 k! 1 Ak 1b o t k 1 ... k 1 ! 1 2 2 1 k k 1 A k1t k 1 ... I At 2 A t ... k! A t b o k 1 !
Da Equação (1.96) tem-se que x (0) bo e:
(1.102)
UNIDADE I
31 1 1 1 e At I At A 2 t2 ... A k t k A k1t k1 ... 2 k! k 1 !
(1.103)
onde e At é chamada de matriz de transição de estados e é simbolicamente representada por ( t ) .
x (t ) e At x(0) ( t) e At
assim:
(1.104)
x (t ) (t ) x(0)
(1.105)
Fazendo t=0 em (1.103) tem-se: (0) I
primeira propriedade
(1.06)
onde I é a matriz identidade. Da Equação (1.105), com t=0 resulta; x( 0) (0)x (0)
(1.107)
Derivando (1.105) e igualando a (1.95) tem-se: x ( t ) ( t) x (0) Ax(t ) (0) x(0) Ax(0) logo
( 0) A
segunda propriedade
(1.108)
As Equações (1.106 e 1.108) são a solução do sistema homogêneo ou não forçado. Para o sistema forçado ou não-homogêneo tem-se: x ( t ) Ax ( t ) Bu( t )
Rearranjando e multiplicando ambos os membros por
(1.109)
e At
tem-se:
eAt x ( t ) Ax( t ) e At Bu( t)
d At e x (t ) eAt Bu(t ) dt
Integrando ambos os membros resulta: e At x (t )
t 0
t A e At x (t ) x(0) Bu ( )d 0e
(1.110)
UNIDADE I
32
Resolvendo (1.110) em termos de x(t) tem-se: t
0
x( t ) e At x(0) e A ( t ) Bu()d t
0
( t )x (0) ( t )Bu ( )d
(1.111)
A integral em (1.111) é chamada integral da convolução. A primeira parcela em (1.111) é chamada resposta à entrada zero e a segunda, resposta no estado zero. Cálculo de ( t ) Da Equação de estado: x ( t ) Ax ( t) (1.112)
tem-se: sX (s) x (0) AX(s)
(1.113)
[sI AX (s)] x (0)
(1.114)
Rearranjando (1.113) resulta:
Pré-multiplicando ambos os membros de (1.114) por (sI A) 1 :
logo:
X(s) (sI A)1 x(0)
(1.115)
adj(sI A) x(0) det(sI A)
(1.116)
adj(sI A) 1 (sI A) 1 1 (t ) det(sI A)
(1.117)
Exemplo: Para a Equação de estado e o vetor inicial mostrado em (1.118a e 1.118b), onde u(t) é um degrau unitário, determine a matriz de transição de estados e em seguida calcule x(t). 0 1 0 x ( t ) x(t) u(t) - 8 - 6 1
(1.118a)
1 x( 0) 0
(1.118b)
Fazendo det sI A 0 , obtém-se os pólos do sistema que são -2 e -4.
UNIDADE I
33
Como cada termo da função é a soma das respostas geradas pelos pólos, a matriz de transição pode ser escrita da seguinte forma: (k1e 2 t k 2 e 4 t ) (t ) (k 5e 2 t k 6 e 4 t )
(k 3e -2t k 4 e -4t ) (k7 e 2 t k 8e 4 t
Usando as propriedades da matriz de transição resulta: (0) I k1 k 2 1 k 3 k 4 0
k 5 k 6 0 k 7 k 8 1 uma vez que
(0) A
2k1 4k 2 0 2k 3 4k 4 1 2k 5 4k 6 8 2k 7 4k 8 6
então:
Portanto: 2 t 1 1 ( 2e e 4 t ) e 2 t e 4 t 2 ( t) 2 2 t 4 t -2t 4 t ( 4e 4e ) (-e 2e ) 1 2 ( t ) 1 4( t ) - e e 2 ( t ) B 2 2 ( t ) 4 ( t ) ( e 2e
O primeiro termo de (1.111) é: (2e 2 t e 4 t ) (t ) x( 0) 2 t 4 t ( 4 e 4 e ) e o último termo de (1.111) é: 1 1 2 t 1 4 t e e 8 8 (t )Bu ( )d 4 0 1 2 t 4 t e 4e 2 t
O resultado final é:
UNIDADE I
34 1 7 2 t 7 4 t e 8 e x( t ) (t ) x(0) ( t ) Bu()d8 4 0 7 2 t 7 4 t e e 2 2 t
A matriz de transição (t ) pode também ser obtida utilizando a transformada de Laplace usando (1.117), ou seja:
adj(sI A) 1 (sI A)1 1 ( t ) det(sI A) s Para o exemplo acima: (sI A) 8
1 s -6
s 6 1 s 6 2 -8 s s 6s 8 (sI A)1 2 s 6s 8 8 s 2 6s 8
s 6s 8 s 2 s 6s 8 1
2
Aplicando a transformada de Laplace inversa a cada um dos termos tem-se: 2 t 1 2 t 1 4 t 4 t (2e e ) e e 2 ( t ) 2 2 t 4 t -2t 4 t (4e 4e ) (-e 2e )
7.0 LINEARIZAÇÃO A linearização de uma equação diferencial não-linear é feita para pequenos valores do sinal de entrada em torno da solução de estado estacionário e é chamada de equilíbrio.
Fig. 1.34 - Linearização em torno de um ponta A
UNIDADE I
35
Se a inclinação do ponto A da Figura (1.34) for ma, uma pequena excursão da entrada em torno deste ponto, x , acarreta pequenas variações na saída f ( x) , relacionado pela inclinação no ponto A: [f (x ) f ( x0 )] m a ( x x 0 )
(1.119)
f ( x) m ax e f ( x) f ( x0 ) m a ( x x 0 )
(1.120)
O novo conjunto de eixos x e f ( x) é criado no ponto A e f(x) é aproximadamente igual a f(x 0). Exemplo: Linearizar f(x) = 5 cos(x) em torno de x = 2 . df ( x) dx
5 e x 2
f (x 0 ) x 2 0
De acordo com (1.120), f(x) = -5 x , para pequenas excursões de x em torno de 2 .
Fig. 1.35 - Linearização de 5cos(x) em torno de 2 Aplicando a série de Taylor: df f (x) f (x 0 ) dx
x x0 d2 f x x 0
1!
dx 2
2 x x0 ... x x 0
2!
(1.121)
Desprezando os termos de ordem mais alta tem-se: df f ( x) f (x 0 ) (x x0 ) dx x x 0
(1.122)
UNIDADE I
36
f ( x ) m x x x
(1.123)
0
Exemplo: Linearizar a Equação (1.124) para pequenas excursões em torno de x= 4 .
d 2x dt
2
2
dx cos( x) 0 dt
(1.124)
Fazendo x x 4 e substituindo em (1.124) tem-se: 2 d x dx 4 4 2 cosx 0 2 dt 4 dt
(1.125)
mas d2 x 2 4 d x 2 2 dt dt
e
d x 4 dx dt dt
(1.126)
O temo cosx , pode ser linearizado por meio da série de Taylor truncada 4 (1.122):
d cos x cosx cos x sen x 4 4 dt x 4 4
2 2 cos x x x cos sen 4 2 2 4 4
(1.127)
Substituindo (1.126 e 1.127) em (1.125) tem-se a seguinte equação diferencial linearizada:
d 2 x d x 2 2 2 x dt 2 2 dt 2
(1.128)
UNIDADE I
37
EXERCÍCIOS DA UNIDADE I 1.1 - Obter a transformada de Laplace inversa de F(s)=10/[s(s+2)(s+3)2]. 1.2 - Obtenha a expansão em frações parciais da seguinte função utilizando o MATLAB: 10(s 2)(s 4) F (s ) (s 1)(s 3)(s 5)2
Em seguida, obtenha a transformada inversa de Laplace de F(s). 1.3 - Considere a seguinte função: s 4 5s3 6s 2 9s 30 F(s) 4 s 6s3 21s2 46s 30 Utilizando o MATLAB obtenha a expansão em frações parciais de F(s) e em seguida determine a transformada de Laplace inversa de F(s). 1.4 - Resolva a seguinte equação diferencial: x2n x2n x 0
onde x(0) a
e x (0) b , com a e b constantes.
1.5 - Obter a FT, G(s) = X 2(s)/F(s) para o sistema mecânico em translação mostrado na Figura (1.1).
Fig. 1.1 - Sistema mecânico em translação 1.6 - Obter a FT
2 (s) / T (s) para o sistema em rotação mostrado na Figura (1.2).
UNIDADE I
38
Fig. 1.2 - Sistema mecânico em rotação 1.7 - Escreva, por inspeção, a forma geral da resposta ao degrau para cada uma das seguintes FT. 400 a) G(s) 2 s 12s 400 225 c) G (s) 2 s 30s 225
900 b) G(s) 2 s 90s 900 625 d) G(s) 2 s 625
1.8 - Obter a função de transferência, G(s) L (s) E a (s) , de um motor e carga mostrado na Figura (1.3). A curva torque-velocidade é dada por Tm 8m 200 , quando a tensão de entrada for 100 V.
Fig. 1.3 - Sistema eletromecânico 1.9 - Obter a função de transferência linearizada, G(s) V(s) I(s) , para o circuito elétrico mostrado na Figura (1.4). O circuito contém um resistor não linear, cuja relação tensão-corrente é definida por i r e v r . A fonte de corrente i(t) é um gerador de pequeno sinal.
Fig. 1.4 - Circuito elétrico não-linear
UNIDADE I
39
1.10 - Simplifique o diagrama de blocos mostrado na Figura (1.5), e obtenha a FT de malha fechada C(s)/R(s).
Fig. 1.5 - Diagrama de blocos de um sistema 1.11 - Obtenha a representação no espaço de estados do sistema mostrado na Figura (1.6).
Fig. 1.6 - Sistema de controle 1.12 - Obtenha os modelos matemáticos dos sistemas mecânicos mostrados nas Figuras (1.7 a e b).
a)
b) Fig. 1.7 - Sistemas mecânicos
UNIDADE I
40
1.13 - Considere o sistema descrito por:
x 4 -1 x1 1 1 u e x - 1 x2 1 2 3
x1 y 1 0 x2
Obtenha a função de transferência do sistema. 1.14 - Obtenha a matriz de transferência do sistema definido por: x 1 0 0 0 x1 1 0 u1 x2 0 0 1 0 1 x2 u2 x 2 4 6 x 1 0 3 3
x1 y1 1 0 0 e x2 y2 0 1 0 x3
1.15 - Obtenha as FT X1(s) U(s) , do sistema mecânico indicado na Figura (1.8).
Fig. 1.8 - Sistema mecânico 1.16 - Represente o circuito elétrico da Figura (1.9) no espaço de estados, onde vo (t) é a saída.
Fig. 1.9 - Circuito RLC 1.17 - Obter a representação no espaço de estados do sistema mecânico mostrado na Figura (1.10).
Fig. 1.10 - Sistema mecânico 1.18 - Representar o sistema mecânico em translação, mostrado na Figura (1.11), no espaço de estados em torno do deslocamento de equilíbrio. A mola é nãolinear: a relação entre a força da mola, xs(t), e o seu deslocamento , xs(t) é
UNIDADE I
41
f s (t) 2xs2 (t) . A força aplicada é f(t) 10 f(t) , onde f(t) é uma pequena força em torno de um valor constante de 10N. Admita que a saída seja o deslocamento da massa x(t).
FIG. 1.11 - Sistema mecânico 1.19 - Obtenha a representação no espaço de estados do sistema mecânico mostrado na Figura (1.12), onde u1 e u2 são as entradas e y1 e y2 são as saídas.
Fig. 1.12 - Sistema mecânico 1.20 - A Figura (1.13) é o diagrama esquemático de um sistema do controle de leme do profundor de uma aeronave. O sinal de entrada do sistema é o ângulo , de deflexão da alavanca de controle e o sinal de saída é o ângulo de elevação . Suponha que os ângulos e sejam relativamente pequenos. Mostre que para cada valor do ângulo da alavanca de controle, existe um valor (de regime permanente), do ângulo de elevação do leme do profundor .
Fig. 1.13 - Sistema de controle do leme do profundor de uma aeronave
UNIDADE I
42 PROGRAMAS MATLAB UNIDADE I
1. Operações básicas 'Título' -3.96 -4+7i -5-6j (-4+7i)+(-5-6i) (-4+7j)*(-5-6j) M=5 N=6 P=M+N
% % % % % % % % % % % % % %
Exibe título. Exibe o número real -3,96. Exibe o número complexo -4+7i. Exibe o número complexo -5-6i. Adiciona os números complexos e Exibe a soma. Multiplica dois num. complexos e Exibe o produto. Atribui o valor 5 a M e exibe o resultado. Atribui o valor 6 a N e exibe o resultado. Atribui o valor M+N a P exibe o resultado.
pause 2. Operações com polinômios '(Título)' P1=[1 7 -3 23]
% Exibe o título. % Armazena o polinômio s^3 + 7s^2 -3s + 23 % como P1 e exibe o resultado. P2=[3 5 7 8]; % Atribui 3s^3 + 5s^2 +7s + 8 a P2 sem % mostrar na tela. P3=poly([-2 -5 -6]) % Armazena o polinômio % (s+2)(s+5)(s+6) como P3 e % exibe os coeficientes. P4=[5 7 9 -3 2] % Forma 5s^4+7s^3+9s^2-3s+2 e % exibe o resultado. raizes_P4=roots(P4) % Acha as raízes de 5s^4+7s^3+9s^2-3s+2, % atribui os valores a raizes_P4, e exibe % o resultado. P5=conv([1 7 10 9],[1 -3 6 2 1]) % Forma o produto %(s^3+7s^2+10s+9)(s^4-3s^3+6s^2+2s+1) %(3s^3+6s^2+2s+1), atribui a P5, e % mostra o resultado. Pause 3. Função de transferência numf=[7 9 12]; % Define o num. de F(s). denf=conv(poly([0 -7]),[1 10 100]); % Define o den. de F(s). [K,p,k]=residue(numf,denf)% Acha os resíduos e os atribui a K; % acha as raízes do denominador e as % atribui a p; acha a % constante e a atribui a k. pause
UNIDADE I
numy=32; % deny=poly([0 -4 -8]); % [r,p,k] = residue(numy,deny)% Calcula % Pause
43 Define o numerador. Define o denominador. os resíduos, os pólos, e o quociente.
4. Método vetorial 'Método Vetorial,Forma Polinomial,' % Exibe título. numf=150*[1 2 7] % Armazena 150(s^2+2s+7) em numf e % mostra o resultado. denf=[1 5 4 0] % Armazena s(s+1)(s+4) em denf e % mostra o resultado na tela. 'F(s)' % Exibe título. F=tf(numf,denf) % Forma F(s) e mostra o resultado. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método Vetorial,Forma Fatorada' % Exibe título. numg=[-2 -4] % Armazena (s+2)(s+4) em numg e % mostra o resultado. deng=[-7 -8 -9] % Armazena (s+7)(s+8)(s+9) em deng e % mostra o resultado. K=20 % Define K. 'G(s)' % Exibe título. G=zpk(numg,deng,K) % Forma G(s) e mostra o resultado. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método da Expressão Racional,Forma Polinomial'% Exibe título. s=tf('s') % Define 's' como um objeto LTI em % forma polinomial. F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] % Forma F(s)como uma função % de transferência % LTI em forma polinomial. G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] % Forma G(s) como uma % função de transferência % LTI em forma polinomial. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método da Expressão Racional,Forma Fatorada' % Exibe título . s=zpk('s') % Define 's' como um objeto LTI em % forma fatorada. F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] % Forma F(s)como uma % função de transferência % LTI em forma fatorada. G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s)como uma % função de transferência % LTI em forma fatorada. pause
UNIDADE I
numftf=[10 40 60] denftf=[1 4 5 7]
44 % Forma o numerador de F(s) = % (10s^2+40s+60)/(s^3+4s^2+5s+7). % Forma o denominator de F(s) = % (10s^2+40s+60)/(s^3+4s^2+5s+7).
'Raízes de F(s)' % Exibe título. [numfzp,denfzp]=tf2zp(numftf,denftf) % Converte F(s) para a % forma fatorada. 'Raízes de G(s)' numgzp=[-2 -4] K=10 dengzp=[0 -3 -5]
% Exibe título. % Forma o numerador de % G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)]. % Forma o denominador de % G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)].
'Coeficientes de G(s)' % Exibe título. [numgtf,dengtf]=zp2tf(numgzp',dengzp',K) % Converte G(s) % para a forma polinomial. Pause 'Fzpk1(s)' Fzpk1=zpk([-2 -4],[0 -3 -5],10)
'Ftf1' Ftf1=tf(Fzpk1)
'Ftf2' Ftf2=tf([10 40 60],[1 4 5 7])
'Fzpk2' Fzpk2=zpk(Ftf2)
% Exibe título. % Forma Fzpk1(s)= % 10(s+2)(s+4)/[s(s+3)(s+5)]. % Exibe título. % Converte Fzpk1(s) à % forma de coeficientes .
% Exibe título. % Forma Ftf2(s)= % (10s^2+40s+60)/(s^3+4s^2+5s+7). % Exibe título. % Converte Ftf2(s) à % forma fatorada.
Pause 5. Transformada de Laplace inversa syms s
% Constrói objeto simbólico para % a variável de Laplace 's'.
'Transformada de Laplace inversa' % Exibe título. F=2/[(s+1)*(s+2)^2]; % Define F(s) no exemplo do Caso 2. 'F(s) do Caso 2' % Exibe título. pretty(F) % Apresenta F(s) na forma "bonita". f=ilaplace(F); % Obtém a transformada de Laplace inversa. 'f(t) do Caso 2' % Exibe título. pretty(f) % Apresenta f(t),do Caso 2, na forma "bonita". F=3/[s*(s^2+2*s+5)]; % Define F(s) no exemplo do Caso 3. 'F(s) do Caso 3' % Exibe título.
UNIDADE I
45
pretty(F) % Apresenta F(s) do Caso 3 na forma "bonita". f=ilaplace(F); % Obtém a transformada de Laplace inversa. 'f(t) do Caso 3' % Exibe título. pretty(f) % Apresenta f(t),do Caso 3, na forma "bonita". Pause 6. Transformada de Laplace syms t
% Constrói objeto simbólico para % time variable 't'.
'Transformada de Laplace' % Exibe título. 'f(t) do Caso 2' % Exibe título. f=2*exp(-t)-2*t*exp(-2*t)-2*exp(-2*t); % Define f(t) do % exemplo do Caso 2. pretty(f) % Apresenta f(t) do Caso 2 na forma "bonita". 'F(s) do Caso 2' F=laplace(f); pretty(F)
% Exibe título. % Obtém a transformada de Laplace. % Forma "bonita" das frações parciais de % F(s) do Caso 2. F=simplify(F); % Combina frações parciais. pretty(F) % Forma "bonita" das frações parciais combinadas. 'f(t) do Caso 3' % Exibe título. f=3/5-3/5*exp(-t)*[cos(2*t)+(1/2)*sin(2*t)]; % Define f(t) do exemplo do Case 3. pretty(f) % Apresenta f(t) do Caso 3na forma "bonita" . 'F(s) do Caso 3 - Frações simbólicas' % Exibe título. F=laplace(f); % Obtém a transformada de Laplace. pretty(F) % Forma "bonita" das frações parciais de % F(s) do Caso 3. 'F(s) do Caso 3 - Representação decimal' % Exibe título. F=vpa(F,3); % Converte frações numéricas simbólicas em % representação decimal de F(s) com 3 % casas decimais. pretty(F) % Forma "bonita" da representação decimal. F=simplify(F); % Combina frações parciais. pretty(F) % Forma "bonita" das frações parciais combinadas. Pause 7. Conv. da representação numerador-denominador para espeço de estado 'Conv. da representação numerador-denominador'% Exibe título. num=24; % Define o numerador de G(s)=C(s)/R(s). den=[1 9 26 24]; % Define o denominador de G(s). [A,B,C,D]=tf2ss(num,den) % Converte G(s)para a % forma canônica % do controlador,
UNIDADE I
46
% armazena as matrizes A, B, C, D, e % mostra o resultado. % Exibe título. 8. Conv. da representação espaço de estado para numerador-denominador A=[0 1 0;0 0 1;-9 -8 -7]; B=[7;8;9]; C=[2 3 4]; D=0; [num,den]=ss2tf(A,B,C,D,1)
Tss=ss(A,B,C,D) Ttf=tf(Tss)
% Representa da matriz A. % Representa da matriz B. % Representa da matriz C. % Representa da matriz D. % Converte uma representação % no espaço de estados % em função de transferência % representada por % um numerador e um denominador,G(s)=num/den, % em forma polinomial, % e mostra num e den. % Form LTI state-space model. % Transforma a representação no espaço de % estados em função de transferência % na forma polinomial.
'Forma fatorada, Tzpk(s)' % Exibe título. Tzpk=zpk(Tss) % Transforma a representação no espaço de % estados em função de transferência % na forma fatorada. Pause
46 páginas
1.0 SISTEMAS DE CONTROLE O que é um sistema? O que é um sistema de controle? O termo sistema é usado para descrever uma série de componentes que interagem para realizar uma determinada função. O aspecto importante de um sistema é a relação entre as entradas e as saídas.
Fig. 1.1 - Blocos representativos de sistemas As relações entre as saídas e as entradas de alguns sistemas podem ser similares:
Fig. 1.2 - Circuito elétrico RC
Fig. 1.3 - Sistema de aquecimento
a)
b)
Fig. 1.4 - a) Tensão no capacitor b) temperatura no recipiente Em alguns casos é conveniente dividir um sistema em vários subsistemas acoplados.
UNIDADE I
2
Fig. 1.5 - Vários subsistemas acoplados Em um sistema de controle, a saída é controlada para ter um valor específico ou variar de forma determinada pela entrada do sistema. . sistemas em malha aberta . sistemas em malha fechada Em um sistema em malha aberta, a entrada é escolhida com base na experiência.
Fig. 1.6 - Sistema em malha aberta Em um sistema em malha fechada, um sinal é realimentado da saída para a entrada, para manter a saída constante, mesmo havendo modificações nas condições de operação.
Fig. 1.6a - Diagrama de blocos em malha fechada Elementos básicos de um sistema em malha aberta Elemento de controle: determina a ação que deve ser tomada visando a entrada do sistema de controle;
UNIDADE I
3
Elemento de correção: responde ao sinal de saída do sinal de controle e age de forma a levar a variável controlada ao valor desejado; Processo ou planta: sistema no qual uma variável é controlada.
Fig. 1.7 - Diagrama de blocos de um sistema em malha aberta
Fig. 1.8 - Sistema de controle de temperatura em malha aberta
Fig. 1.9 - Diagrama de blocos de um sistema em malha fechada
UNIDADE I
4
Fig. 1.10 - Sistema de controle de temperatura em malha fechada Controle de velocidade de um motor elétrico
Fig. 1.11 - Sistema de controle de um motor de CC em malha fechada Controle de direção e velocidade de um automóvel
Fig. 1.12 - Sistema de controle de direção e velocidade de automóvel
UNIDADE I
5
2.0 TRANSFORMADA DE LAPLACE A transformada de Laplace é um método de transformar equações diferenciais em equações algébricas mais facilmente solucionáveis. Através da transformada de Laplace é possível converter senóides, exponenciais, etc.., em funções algébricas de uma variável complexa "S".
[f ( t )] f ( t )e st dt F(s)
Definição:
o
Exemplo: Uma resistência elétrica é percorrida por uma corrente que varia no tempo: v( t ) Ri( t )
logo:
v(t )e o
st
dt Ri (t )e o
st
(1.1) V (s) RI (s)
dt
(1.2)
Função degrau
f ( t ) 1 f (t ) 0
para t>0 para t<0
f (t ) a f ( t ) 0
para t>0 para t<0
1s
1 F(s) 1.estdt e st o s
então:
o
(1.3)
Se a função degrau tem amplitude "a" tem-se: a F (s ) s
(1.4)
f (t ) e at
(1.5)
Função exponencial
1 1 F(s) eat e stdt e ( s a ) t o o s a s a
2.1 Regras básicas
f1 (t ) f 2 ( t ) F1 (s) F2 (s) f1 (t ) f2 ( t ) F1 (s) F2 (s)
(1.6)
UNIDADE I
6 a .f (t ) a.F(s)
f ( t T ) e sT F(s) d f ( t ) s.F(s) f (0) dt
d 2f ( t ) df (0) s2 F(s) sf (0) 2 dt dt d n f ( t) dt n
n
s n F(s) sn k f k 1 (0) k 1
f (t )
onde:
k 1
d k 1f (t ) k 1 dt
Tab. 1.1 - Transformadas de Laplace Exemplo: Determinar a transformada de Laplace das seguintes funções: a) t 2 e at
b) t 2 (1 eat )
a) Consultando uma Tabela tem-se:
UNIDADE I
7
n! t n e at p/ (n=1,2,3...) F(s) (s a ) n 1 2! 2 2 1 (s a ) (s a ) 3
t 2 (1 e at ) t 2 t 2 e at
b)
Consultando uma Tabela Tem-se: n! 2 2 f (t ) t F(s) n 1 3 s s
2 f ( t ) t 2 eat F(s) (s a )3 2 2 F(s) 3 s (S a ) 3
e
Transformada de Laplace de uma equação diferencial 3
3
dx( t ) 2x ( t) 4 dt
dx( t ) 3[sX (s) x (0)] dt
2 x( t ) 2X (s )
se
x (0) 0
e
4
4 s
4 3[sX (s) 0] 2X(s) s
4 X (s) 2 3s 2s
Quando um termômetro é inserido em um líquido a uma temperatura Ti , a temperatura lida na saída T o é dada pela seguinte equação diferencial: k
dTo (t ) Ti To ( t ) dt
dTo ( t ) sTo (s) com dt
logo:
To (0) 0 e Ti
T T (s ) 1 ksTo (s) i To (s) o s Ti s(ks 1)
(1.7) Ti s
(1.8)
UNIDADE I
8
2.2 Transformada Inversa de Laplace A transformada inversa de Laplace é definida por: 1 c j 1 st [F(s)] f ( t ) F(s) e ds, 2 cj
para t 0
(1.9)
Esta equação é complicada, por isso, seu uso não é recomendado para obter a transformada inversa. Se a transformada não está na forma reconhecível na tabela, recorre-se às frações parciais. Se F(s) for decomposta em componentes:
F(s) F1 (s) F2 (s) ....Fn (s)
(1.10)
e se as transformadas inversas estiverem disponíveis, então: 1 1 1 1 [ F(s)] [F1 (s)] [F2 (s)] ..... [ Fn (s)]
f1 ( t ) f2 ( t) .... f n ( t )
(1.11)
Exemplo: A transformada inversa de Laplace para: 3 3 X (s ) 2 s 2s s(s 2) Consultando uma tabela tem-se: 1 1 (1 e at ) s(s a ) a
onde a = 2
3 x (t ) (1 e 2 t ) 2
logo:
O processo de converter uma expressão algébrica em frações simples é chamado de decomposição em frações parciais. Os três tipos básicos de frações parciais: 1. Fatores lineares no denominador; Expressão:
Fração parcial:
f (s) (s a )(s b)(s c)
(1.12)
A B C (s a ) (s b ) (s c)
(1.13)
UNIDADE I
9
2. Fatores lineares repetidos no denominador;
f (s ) (s a ) n
Expressão:
Fração parcial:
(1.14)
A B N .... (s a ) (s a )2 (s a ) n
(1.15)
3. Fatores quadráticos no denominador, quando o fator tem raízes complexas conjugadas. f (s )
Expressão:
(1.16)
2
s bs c
As B
Fração parcial:
(1.17)
as bs c 2
Se existe um fator linear no denominador:
f ( t) (as bs c )(s d)
Expressão:
2
As B C 2 as bs c (s d)
Fração parcial: Exemplo:
s 5 s 5 A B s2 3s 2 (s 1)(s 2) s 1 s 2 A(s 2) B(s 1) (s 1)(s 2) A (s 2) B(s 1) s 5 ( A B)s s
logo
B 3
e e
2A B 5
A 4
s 5
4 3 s 3s 2 s 1 s 2
logo:
2
Exemplo: Encontrar a solução da seguinte equação diferencial:
(1.18)
(1.19)
UNIDADE I
10 x2 x5 x 3,
x( 0) 0 e
x(0) 0
A transformada de Laplace conduz a: 3 s 2X(s) 2sX (s) 5X(s) s
Resolvendo para X(s) tem-se:
3 3 3 2 3 s 1 X (s ) 2 2 2 5 (s 1)2 22 s(s 2s 5) 5s 10 (s 1) 2 A transformada de Laplace inversa é: 1 x( t ) [ X(s)]
3 1 s 1 3 1 1 3 1 2 5 s 10 (s 1) 2 2 2 5 (s 1) 2 2 2 3 3 3 e t sen 2t e t cos 2 t , 5 10 5
para t 0
Tab. 1.2 - Teoremas da transformada de Laplace
UNIDADE I
11
Expressões em frações parciais com o Matlab Exemplo: Converter em frações parciais a seguinte expressão: B(s) 2s3 5s 2 3s 6 A(s) s3 6s2 11s 6 Comandos: NUM=[2 5 3 6] e DEN=[1 6 11 6] [r,p,k]=residue(NUM,DEN) resultados r = -6.00/-4.00/3.00; p = -3.00/-2.00/-1.00
k=2
B(s) 6 4 3 2 A(s) s 3 s 2 s 1 O comando [NUM,DEN]=residue(r,p,k) efetua o processo inverso. 3.0 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS É um conjunto de equações que representam a dinâmica do sistema e que pode ser descrito por equações diferenciais. Sistemas Lineares - Quando é possível aplicar o princípio da superposição. Sistemas não-lineares - não se aplica o princípio da superposição.
Fig. 1.13 - a) função linear; b) função não-linear 3.1 Modelagem matemática de um sistema massa-mola Determinar o modelo matemático do sistema massa-mola mostrado na Figura (1.14).
UNIDADE I
12
Fig. 1.14 - Sistema massa-mola A equação dinâmica do sistema é: ma f kx cv m
f m
d 2x dt
2
c
d2 x
(1.20)
dt 2
dx kx dt
(1.21)
Na ausência de amortecimento a massa "m" oscilará com uma frequência natural k n . m
é:
E a razão de amortecimento
c 2 mk
1 d2 x
logo:
2n 1 2n
dt
2
(1.22)
2dx x f / k n dt
2 s 2 X(s) sX(s) X(s) F(s) / k n F(s) / k
X(s)
2
2
F(s)n / k 2 2 s 2n s n
2 s 1 2 n n Se f for respectivamente, um impulso e um degrau unitários tem-se: s
1 x( t ) n e n t sen(n t 1 2 ) k 1 2 1 x( t ) 1 n e n t sen(n t 1 2 ) k 1 2
(1.23)
(1.24)
(1,24a)
UNIDADE I
3.2
13
Modelagem matemática de um motor de corrente contínua com o campo constante
Fig.1.15 - Diagrama esquemático de um motor de CC e a (t ) vb ( t ) L a v b (t ) k b
onde:
di a R a i a dt
dm ( t ) dt
E a (s) Vb (s) L a sIa (s) R a Ia (s)
ou
Vb (s) k bsm (s)
onde:
(1.25)
(1.26)
(1.27)
(1.28)
Substituindo (1.28) em (1.27), tem-se: E a (s) k b sm (s) L asIa (s) R a Ia (s)
(1.29)
O torque no eixo do motor é dado por: Tm (t ) k t i a (t )
ou
Tm (s) k t Ia (s)
(1.30)
onde k t é a constante de torque A Figura (1.16) mostra um carregamento típico de um motor, onde Jm e Dm são a inércia e o amortecimento viscoso equivalentes referidos ao eixo do motor.
Fig. 1.16 - Carregamento mecânico típico de um motor logo:
Tm (s) J ms 2 Dm s m (s)
(1.31)
UNIDADE I
14
Substituindo (1.30 e 1.31) em (1.29) resulta:
R a L as Jm s2 D msm (s)
E a (s) k b sm (s)
(1.32) kt Admitindo que a indutância de armadura é muito menor que a resistência tem-se: R J s D m sm (s) E a (s ) a m kt
(1.33)
A função de transferência desejada é: m (s) kt RaJ m E a (s ) 1 kk s s Dm t b Ra Jm
(1.34)
ou m (s) k E a (s ) s s a
(1.35)
A Figura (1.17) mostra um motor de inércia J a e de amortecimento Da acionando uma carga de inércia J L e de amortecimento DL.
Fig. 1.17 - Motor mais carga A inércia e o amortecimento referidos à armadura são: 2
N1 Jm Ja J L N 2
2
e
N1 Dm Da DL N 2
(1.36)
Substituindo (1.30) em (1.29) e fazendo La = 0 tem-se: R E a (s) a Tm (s) k b sm (s) kt
(1.37)
Aplicando a transformada de Laplace inversa resulta: R ea (t ) a Tm (t ) k b m (t ) kt
(1.38)
UNIDADE I
15
Para o motor operando em estado estacionário o torque Tm é dado por: k k k Tm b t m t e a Ra Ra
Estudo de caso
Fig. 1.18 - Sistema de controle de posicionamento de uma antena
Fig. 1.18 - Diagrama esquemático do sistema de controle
Fig. 1.19 - Diagrama de blocos do sistema de controle
(1.39)
UNIDADE I
16
Tab. 1.3 - Parâmetros do sistema Potenciômetro de entrada Desprezando a dinâmica do potenciômetro, a relação entre a tensão de saída e o deslocamento angular de entrada é: Vi (s) 10 1 i (s) 10
Pré-amplificador Supondo que não há saturação, e que a dinâmica é desprezada, a relação entre a tensão de entrada e de saída é: Vp (s) K Vi (s) Amplificador de potência Considerando a dinâmica do amplificador de potência, devido este ser muito mais lento do que o pré-amplificador tem-se: E a (s ) 100 Vp (s) s 100 Motor mais carga A inércia total com relação ao eixo do motor é: 2
25 1 J m Ja JL 0.03 0.02 1 100 250 O coeficiente de amortecimento Dm , equivalente ao eixo de armadura é: 2 1 25 Dm Da D L 0.01 1 0.02 100 250
onde DL é o coeficiente de amortecimento viscoso referido a 0.
UNIDADE I
17
A função de transferência, que relaciona o deslocamento angular do eixo da armadura e a tensão de armadura é dada por: m K t ( R a Jm ) 2,083 Ea 1 s s 1,71 KK s s Dm t b Ra Jm
onde Kt é a constante de torque; Ra a resistência de armadura e Kb a constante de velocidade.
Fig. 1.20 - Resposta do sistema para dois ganhos distintos do controlador 4.0
DIAGRAMA DE BLOCOS
Para mostrar as funções desempenhadas por cada componente de um sistema de controle, costuma-se usar um diagrama chamado "Diagrama de blocos". Elemento de um diagrama de blocos
Ponto de soma
UNIDADE I
18
Ponto de distribuição
Diagrama de blocos a malha aberta
Fig. 1.21 - a) blocos separados; b) bloco equivalente Diagrama de blocos de um sistema a malha fechada
Fig. 1.22 - Sistema em malha fechada Função de transferência de ação direta. C(s) G2 (s)G3 (s) E (s )
FTAD
(1.40)
Função de transferência a malha aberta B(s) G 2 (s) G3 (s)H1 (s)H2 (s) E(s)
FTMA
(1.41)
Função de transferência a malha fechada C(s) G 2 (s)G 3E (s) G(s)E (s)
(1.42)
H(s) H1 (s)H 2 (s)
(1.43)
UNIDADE I
19
Fig. 1.23 - Diagrama de blocos equivalente E(s) R (s) B(s) R (s) H (s)C(s)
(1.44)
Eliminando E(s) tem-se: C(s) G (s)[ R(s) H (s)C(s)]
C(s) G (s ) R (s) 1 G(s)H(s)
(1.45) FTMF
(1.46)
Fig. 1.24 - Diagrama de blocos equivalente Sistema a malha fechada sujeito a uma perturbação
Fig. 1.25 - Diagrama de blocos com perturbação Neste caso, aplica-se o princípio de superposição. Fazendo R(s) =0, tem-se:
CD (s) G 2 (s)[ D(s) G1 (s)H(s)C D (s)]
(1.47)
G 2 (s) D(s) G 2 (s)G1 (s) H(s) CD (s) CD (s)[1 G 2 (s) G1 (s)H(s)] G 2 (s) D(s)
CD (s ) G 2 (s) D(s) 1 G 2 (s) G1 (s)H(s)
(1.48)
UNIDADE I
20
Fazendo D(s) = 0, tem-se: C R (s ) G1 (s)G 2 (s) R (s) 1 G1 (s)G2 (s)H(s)
(1.49)
logo:
C(s) C D (s) C R (s) G 2 (s ) [G1 (s)R (s) D(s)] 1 G1 (s)G2 (s)H(s)
G1 (s)H(s) 1 e
se
(1.50)
G1 (s) G2 (s)H(s) 1
CD (s) é quase zero e os efeitos do distúrbio podem ser suprimidos. D (s ) Esta é uma vantagem dos sistemas a malha fechada
a FTMF
Neste caso, se
CR (s) 1 R (s) H(s) H (s) 1 C(s) R (s)
Exemplo: Simplificar o seguinte diagrama de blocos
Fig. 1.26 - Diagrama de blocos de um sistema
X1 CH2 G1 H1G 2 X1 RG1 CG1 X1 (1 G1G 2 H1 ) CH2 CG1 RG1 C(H 2 G1 ) RG1 X1 1 G1G 2 H1 C G 2 G3 X1 G 2G 3
C( H2 G1 ) RG 1 1 G1 G2 H1
C[1 G1G 2 H1 G2 G3 (G1 H 2 )] G1G 2 G3R
(1.51)
UNIDADE I
21 C G1G2 G 3 R 1 G1G 2 H1 G1 G2 G3 G 2 G3 H2
Fig. 1.27 - Diagrama de blocos equivalente Note-se que o numerador da FTMF é o produto das FT do percurso de ação direta e o denominador é igual a:
(produto das FT ao longo de cada malha)
1
5.0 REPRESENTAÇÃO NO ESPAÇO DE ESTADO Estado: O estado de um sistema dinâmico é o menor conjunto de valores de variáveis, chamadas variáveis de estado. Variáveis de estado: são as grandezas cujo conjunto de valores determina o estado do sistema (descrevem completamente o comportamento dinâmico do mesmo). Vetor de estado: são as variáveis de estado representadas por um vetor. Espaço de estado: o espaço n-dimensional cujos eixos coordenados consistem nos eixos x 1,x2,...xn é chamado espaço de estados (qualquer estado pode ser representado por um ponto no espaço de estados). A análise no espaço de estado envolve três tipos de variáveis: variáveis de entrada, de saída e de estado, conhecidas para t=to e t tº O número de variáveis de estado necessárias na definição completa da dinâmica de um sistema é igual ao número de integradores envolvidos. Circuito RL
Fig. 1.28 - Circuito elétrico com uma indutância e uma resistência em série Escrevendo a equação do circuito tem-se: L
di Ri v(t ) dt
(1.52)
A transformada de Laplace é: L[sI (s) i(0)] RI (s) V (s)
Admitindo que a entrada v(t) é um degrau unitário tem-se:
(1.53)
UNIDADE I
22 1 1 1 I (s) R s s R L
i (0) R s L
(1.54)
logo: 1 L t i(0) e L t i (t ) 1 e R R
R
(1.55)
onde i(t) é um subconjunto de todas as variáveis possíveis do circuito e pode ser determinada se v(t) e i(0) forem conhecidos. Neste caso, i(t) é uma variável de estado e (1.52) é uma equação de estado. As outras variáveis são:
vR ( t ) Ri (t )
(1.56)
vL ( t ) v( t ) Ri ( t)
(1.57)
di 1 [v (t ) Ri (t )] dt L
(1.58)
e
A Equação (1.52) combinada com (1.56 e 1.58) formam uma representação no espaço de estados. A Equação (1.52) não é única. Poderia ter sido escrita em termos de qualquer outra variável do circuito. v Por exemplo: fazendo i R em (1.52) resulta: R L dv R v R v( t ) R dt
que pode ser resolvida conhecendo-se a condição inicial:
v R (0) Ri( 0) e v(t ) Circuito RLC
Fig. 1.29 - Circuito RLC série
(1.59)
UNIDADE I
23
A equação do circuito é: di 1 Ri idt v( t) dt C dq Expressando em função da carga e usando i (t ) tem-se: dt 2 d q dq 1 L 2 R q v(t ) dt C dt
L
(1.60)
(1.61)
A Equação (1.61) pode ser representada por duas equações diferenciais de primeira ordem, simultâneas, em termos de i(t) e q(t), escolhidas como variáveis de estado, que são as seguintes: dq (t ) i (t ) dt
(1.62)
di ( t) 1 R 1 q( t ) i (t ) v (t ) dt LC L L
(1.63)
As Equações (1.62 e 1.63) são as equações de estado e podem ser resolvidas para obter q(t) e i(t) se q(0), i(0) e v(t) são conhecidas. Com base em (1.62 e 1.63) pode-se calcular todas as outras variáveis do circuito: 1 vL ( t ) q( t ) Ri( t ) v(t ) C
(1.64)
vR ( t ) Ri (t )
(1.65)
1 vC ( t ) q (t ) (1.66) C As Equações (1.62 e 1.63), combinadas e a equação de saída (1.64), constituem uma representação no espaço de estados. Uma outra escolha de variáveis de estado pode ser feita, por exemplo, com vR (t) e vc (t). Atenção! Nenhuma das variáveis de estado pode ser escrita como combinação linear das outras variáveis de estado. As variáveis de estado devem ser linearmente independentes. Se o sistema for linear, as equações de estado (1.62) e 1.63) podem ser escritas na forma matricial: x ( t ) Ax ( t) Bu( t )
onde
dq x ( t ) dt ; di dt
0 A 1 LC
(1.67) 1 R ; LC
UNIDADE I
24
q x ( t) ; i
0 B 1 e L
u( t ) v( t )
A Equação de saída (1.64), pode ser escrita da seguinte forma: y Cx Du (t )
1 C C
onde:
- R ;
D 1
(1.68) e u (t ) v(t )
O circuito analisado representa um sistema com uma única entrada e uma única saída, nos quais y, D e u são grandezas escalares. Análise de um sistema com múltiplas entradas, múltiplas saídas e n integradores:
u1 (t ), u 2 (t ),.......u r ( t ) y1 ( t ), y 2 ( t ),........ym (t )
variáveis de entrada
(1.69)
variáveis de saída
(1.70)
Definindo as n variáveis do sistema dos integradores como variáveis de estado com valores: x1 (t),x2(t),....,xn (t). O sistema pode ser descrito por:
x 1 (t ) f1 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 2 ( t ) f 2 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) : : x n (t ) f n (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t )
(1.71)
y1 ( t ) g1 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y2 ( t) g 2 (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) : : ym (t ) g m ( x1 , x 2 ,..., xn ; u1 , u 2 ,..., u r ; t)
(1.72)
Definindo-se: f1 ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 1 (t ) f2 ( x1, x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) x 2 (t ) , f ( x , u , t ) x (t ) : x n (t ) fn (x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t
(1.73)
UNIDADE I
25 g1 ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y1 ( t) g2 ( x1, x 2 ,..., x n ; u1 , u 2 ,..., u r ; t ) y 2 (t ) , g ( x , u , t ) y( t ) : y n (t ) gn ( x1 , x 2 ,..., x n ; u1 , u 2 ,..., u r ; t u1 ( t ) u (t ) u( t ) 2 : u n ( t ) x(t ) f ( x, u , t )
e
e
(1.74)
(1.75)
y(t ) g (x, u, t )
x ( t ) A ( t) x (t ) B(t ) u( t )
(1.76)
y( t ) C(t ) x( t ) D( t )u (t )
(1.77)
onde A (t ) é a matriz de estado, B( t ) é a matriz de entrada, C(t ) é a matriz de saída e D( t ) é a matriz de transição direta. Se as matrizes A,B,C,D independem do tempo (constantes), o sistema é dito invariante no tempo. x(t ) Ax ( t ) Bu( t )
(1.78)
y (t ) Cx (t ) Du ( t )
(1.79)
Na Figura (1.30) tem-se a representação das Equações (1.76 e 1.77), sob a forma de diagrama de blocos.
Fig. 1.30 - Diagrama de blocos na forma de espaço de estado Exemplo: Admita-se que o sistema da Figura (1.31) seja linear e que a força u(t) seja a entrada do sistema. O deslocamento y(t) é medido a partir da posição de equilíbrio, na ausência da força externa.
UNIDADE I
26
Fig. 1.31 - Sistema mecânico A equação do movimento é: m ybyky u
Como o sistema é de Segunda ordem, o mesmo envolve dois integradores. Definindose as variáveis de estado como x1(t) e x 2(t), tem-se:
x1 ( t ) y( t ) e
x 2 (t ) y ( t) logo: e
x 1 x 2 1 1 k b 1 x2 ky b y u x1 x 2 u m m m m m
Sob a forma matricial tem-se: 0 1 0 x x1 1 b 1 u k x2 - x2 m m m
e
y 1
x1 0 x2
A Figura (1.32) mostra o diagrama de blocos do sistema mostrado na Figura (1.31).
Fig. 1.32 - Diagrama de blocos
UNIDADE I
27
Correlação entre função de transferência e equações no espaço de estados Considere-se o sistema cuja função de transferência é dada por: Y (s ) G(s) U (s )
(1.80)
que pode ser representado no espaço de estados pelas seguintes equações: x(t ) Ax ( t ) Bu( t )
(1.81)
y (t ) Cx (t ) Du ( t )
(1.82)
onde x(t) é o vetor de estado, u(t) é a entrada e y(t) é a saída. A transformada de Laplace das Equações (1.81 e 1.82) é: sX (s) x (0) AX(s) BU (s)
(1.83)
e Y (s) CX (s) DU (s)
(1.84)
Admitindo que X(0)=0, tem-se: sX (s) AX(s) BU (s)
(1.85)
(sI A )X (s) BU (s)
(1.86)
Multiplicando a esquerda de ambos os membros por (sI A) 1 :
X(s) (sI A)1 BU(s)
(1.87)
Substituindo (1.87) em (1.84) resulta:
Y(s) C(SI A)1 B D U(s) onde
(1.88)
G (s) C(SI A)1 B D Q (s ) G (s) sI A
onde Q (s) é um polinômio em S e sI A é o polinômio característico de G(s). Exemplo: Considere o sistema da Figura (1.31):
G(s) C(SI A)1 B D
(1.89)
UNIDADE I
28 s 0 0
1
s 0 k m
1
s k m
0 0 k s m
1
1 b - m 1
- 1 b s m
1
0 1 m
-1 1 b s s 2 b s k m m m
G(s) 1
1 0 b k s2 s m m
0 1 0 m
b s m k m
b s m k m
1 s
1 0 1 s m
1 2 ms bs k
Representação de sistemas dinâmicos excitação n
no espaço de estados sem derivadas de
n 1
ya1 y ... a n 1 ya n y u ( n 1)
x1 y; x 2 y ; ........; x n y x 1 x 2 ;
x2 x 3 ; ..........; xn -1 x n
x a n x1 a n 1 x 2 ....... a1 x n u n onde: 0 1 x1 0 0 x 2 x ; A : : : 0 0 xn - a n - a n -1
0 ... 0 0 1 ... 0 0 : : ; B : 0 0 0 - a n -2 ... - a1 1
(190)
UNIDADE I
29 x1 x2 y 1 0 ... 0 : xn
A Figura (1.33) mostra a realização dessas equações na forma de diagrama de blocos.
Fig. 1.33 - Diagrama de blocos do sistema representado por (1.90) Na forma de função de transferência
Y (s ) 1 n U(s) s a 1sn 1 ... a n 1s a n Representação de sistemas dinâmicos excitação n
n 1
no espaço de estados com derivadas de
n
(n 1)
y a1 y .. a n 1ya n y b o ub1 u .. b n 1ubn u
x 1 x 2 ;
(1.91)
(1.92)
x2 x 3 ; ..........; xn -1 x n
x a n x1 a n 1 x 2 ....... a 1x n n n
(n 1)
b o u b1 u ..... b n 1ubn u Para eliminar as derivadas da excitação do segundo membro as n variáveis são definidas da seguinte forma: x1 y o u x 2 yo u1u x 1 1u x 3 yo u1 u2 u x2 2 u (n 1)
(n 1)
(n 2 )
x n y o u 1 u .. n 2 un 1u xn 1 n 1 u
Substituindo (1.93) em (1.92) tem-se:
(1.93)
UNIDADE I
30 o b o 1 b1 a 1o 2 b2 a 11 a 2o n b n a 1n 1 ... a n 11 a n o
(1.94)
Solução das equações de estado no domínio do tempo Admita-se, primeiramente, a equação de estado homogênea na forma: x( t) Ax (t )
(1.95)
A solução pode ser dada pela seguinte série: x( t ) bo b1t b2 t 2 .... bk t k b k 1 t k 1 ...
(1.96)
Substituindo (1.96 em 1.95), tem-se:
b1 2b 2 t ... kbk t k 1 ( k 1)b k 1 t k ...
A bo b1t b2 t 2 ... bk t k bk 1 t k 1 ...
(1.97)
Igualando os coeficientes semelhantes resulta: b1 Abo
(1.98)
1 1 2 b2 Ab 1 A bo 2 2
(1.99)
1 k bk A b o k!
1 A k 1 b0 k 1 !
bk 1
(1.100) (1.101)
Substituindo (1.98, 1.99, 1.100 e 1.101 em (1.96) tem-se: 1 1 x (t ) b o Ab o t A2 b o t 2 ... Ak bo t k 2 k! 1 Ak 1b o t k 1 ... k 1 ! 1 2 2 1 k k 1 A k1t k 1 ... I At 2 A t ... k! A t b o k 1 !
Da Equação (1.96) tem-se que x (0) bo e:
(1.102)
UNIDADE I
31 1 1 1 e At I At A 2 t2 ... A k t k A k1t k1 ... 2 k! k 1 !
(1.103)
onde e At é chamada de matriz de transição de estados e é simbolicamente representada por ( t ) .
x (t ) e At x(0) ( t) e At
assim:
(1.104)
x (t ) (t ) x(0)
(1.105)
Fazendo t=0 em (1.103) tem-se: (0) I
primeira propriedade
(1.06)
onde I é a matriz identidade. Da Equação (1.105), com t=0 resulta; x( 0) (0)x (0)
(1.107)
Derivando (1.105) e igualando a (1.95) tem-se: x ( t ) ( t) x (0) Ax(t ) (0) x(0) Ax(0) logo
( 0) A
segunda propriedade
(1.108)
As Equações (1.106 e 1.108) são a solução do sistema homogêneo ou não forçado. Para o sistema forçado ou não-homogêneo tem-se: x ( t ) Ax ( t ) Bu( t )
Rearranjando e multiplicando ambos os membros por
(1.109)
e At
tem-se:
eAt x ( t ) Ax( t ) e At Bu( t)
d At e x (t ) eAt Bu(t ) dt
Integrando ambos os membros resulta: e At x (t )
t 0
t A e At x (t ) x(0) Bu ( )d 0e
(1.110)
UNIDADE I
32
Resolvendo (1.110) em termos de x(t) tem-se: t
0
x( t ) e At x(0) e A ( t ) Bu()d t
0
( t )x (0) ( t )Bu ( )d
(1.111)
A integral em (1.111) é chamada integral da convolução. A primeira parcela em (1.111) é chamada resposta à entrada zero e a segunda, resposta no estado zero. Cálculo de ( t ) Da Equação de estado: x ( t ) Ax ( t) (1.112)
tem-se: sX (s) x (0) AX(s)
(1.113)
[sI AX (s)] x (0)
(1.114)
Rearranjando (1.113) resulta:
Pré-multiplicando ambos os membros de (1.114) por (sI A) 1 :
logo:
X(s) (sI A)1 x(0)
(1.115)
adj(sI A) x(0) det(sI A)
(1.116)
adj(sI A) 1 (sI A) 1 1 (t ) det(sI A)
(1.117)
Exemplo: Para a Equação de estado e o vetor inicial mostrado em (1.118a e 1.118b), onde u(t) é um degrau unitário, determine a matriz de transição de estados e em seguida calcule x(t). 0 1 0 x ( t ) x(t) u(t) - 8 - 6 1
(1.118a)
1 x( 0) 0
(1.118b)
Fazendo det sI A 0 , obtém-se os pólos do sistema que são -2 e -4.
UNIDADE I
33
Como cada termo da função é a soma das respostas geradas pelos pólos, a matriz de transição pode ser escrita da seguinte forma: (k1e 2 t k 2 e 4 t ) (t ) (k 5e 2 t k 6 e 4 t )
(k 3e -2t k 4 e -4t ) (k7 e 2 t k 8e 4 t
Usando as propriedades da matriz de transição resulta: (0) I k1 k 2 1 k 3 k 4 0
k 5 k 6 0 k 7 k 8 1 uma vez que
(0) A
2k1 4k 2 0 2k 3 4k 4 1 2k 5 4k 6 8 2k 7 4k 8 6
então:
Portanto: 2 t 1 1 ( 2e e 4 t ) e 2 t e 4 t 2 ( t) 2 2 t 4 t -2t 4 t ( 4e 4e ) (-e 2e ) 1 2 ( t ) 1 4( t ) - e e 2 ( t ) B 2 2 ( t ) 4 ( t ) ( e 2e
O primeiro termo de (1.111) é: (2e 2 t e 4 t ) (t ) x( 0) 2 t 4 t ( 4 e 4 e ) e o último termo de (1.111) é: 1 1 2 t 1 4 t e e 8 8 (t )Bu ( )d 4 0 1 2 t 4 t e 4e 2 t
O resultado final é:
UNIDADE I
34 1 7 2 t 7 4 t e 8 e x( t ) (t ) x(0) ( t ) Bu()d8 4 0 7 2 t 7 4 t e e 2 2 t
A matriz de transição (t ) pode também ser obtida utilizando a transformada de Laplace usando (1.117), ou seja:
adj(sI A) 1 (sI A)1 1 ( t ) det(sI A) s Para o exemplo acima: (sI A) 8
1 s -6
s 6 1 s 6 2 -8 s s 6s 8 (sI A)1 2 s 6s 8 8 s 2 6s 8
s 6s 8 s 2 s 6s 8 1
2
Aplicando a transformada de Laplace inversa a cada um dos termos tem-se: 2 t 1 2 t 1 4 t 4 t (2e e ) e e 2 ( t ) 2 2 t 4 t -2t 4 t (4e 4e ) (-e 2e )
7.0 LINEARIZAÇÃO A linearização de uma equação diferencial não-linear é feita para pequenos valores do sinal de entrada em torno da solução de estado estacionário e é chamada de equilíbrio.
Fig. 1.34 - Linearização em torno de um ponta A
UNIDADE I
35
Se a inclinação do ponto A da Figura (1.34) for ma, uma pequena excursão da entrada em torno deste ponto, x , acarreta pequenas variações na saída f ( x) , relacionado pela inclinação no ponto A: [f (x ) f ( x0 )] m a ( x x 0 )
(1.119)
f ( x) m ax e f ( x) f ( x0 ) m a ( x x 0 )
(1.120)
O novo conjunto de eixos x e f ( x) é criado no ponto A e f(x) é aproximadamente igual a f(x 0). Exemplo: Linearizar f(x) = 5 cos(x) em torno de x = 2 . df ( x) dx
5 e x 2
f (x 0 ) x 2 0
De acordo com (1.120), f(x) = -5 x , para pequenas excursões de x em torno de 2 .
Fig. 1.35 - Linearização de 5cos(x) em torno de 2 Aplicando a série de Taylor: df f (x) f (x 0 ) dx
x x0 d2 f x x 0
1!
dx 2
2 x x0 ... x x 0
2!
(1.121)
Desprezando os termos de ordem mais alta tem-se: df f ( x) f (x 0 ) (x x0 ) dx x x 0
(1.122)
UNIDADE I
36
f ( x ) m x x x
(1.123)
0
Exemplo: Linearizar a Equação (1.124) para pequenas excursões em torno de x= 4 .
d 2x dt
2
2
dx cos( x) 0 dt
(1.124)
Fazendo x x 4 e substituindo em (1.124) tem-se: 2 d x dx 4 4 2 cosx 0 2 dt 4 dt
(1.125)
mas d2 x 2 4 d x 2 2 dt dt
e
d x 4 dx dt dt
(1.126)
O temo cosx , pode ser linearizado por meio da série de Taylor truncada 4 (1.122):
d cos x cosx cos x sen x 4 4 dt x 4 4
2 2 cos x x x cos sen 4 2 2 4 4
(1.127)
Substituindo (1.126 e 1.127) em (1.125) tem-se a seguinte equação diferencial linearizada:
d 2 x d x 2 2 2 x dt 2 2 dt 2
(1.128)
UNIDADE I
37
EXERCÍCIOS DA UNIDADE I 1.1 - Obter a transformada de Laplace inversa de F(s)=10/[s(s+2)(s+3)2]. 1.2 - Obtenha a expansão em frações parciais da seguinte função utilizando o MATLAB: 10(s 2)(s 4) F (s ) (s 1)(s 3)(s 5)2
Em seguida, obtenha a transformada inversa de Laplace de F(s). 1.3 - Considere a seguinte função: s 4 5s3 6s 2 9s 30 F(s) 4 s 6s3 21s2 46s 30 Utilizando o MATLAB obtenha a expansão em frações parciais de F(s) e em seguida determine a transformada de Laplace inversa de F(s). 1.4 - Resolva a seguinte equação diferencial: x2n x2n x 0
onde x(0) a
e x (0) b , com a e b constantes.
1.5 - Obter a FT, G(s) = X 2(s)/F(s) para o sistema mecânico em translação mostrado na Figura (1.1).
Fig. 1.1 - Sistema mecânico em translação 1.6 - Obter a FT
2 (s) / T (s) para o sistema em rotação mostrado na Figura (1.2).
UNIDADE I
38
Fig. 1.2 - Sistema mecânico em rotação 1.7 - Escreva, por inspeção, a forma geral da resposta ao degrau para cada uma das seguintes FT. 400 a) G(s) 2 s 12s 400 225 c) G (s) 2 s 30s 225
900 b) G(s) 2 s 90s 900 625 d) G(s) 2 s 625
1.8 - Obter a função de transferência, G(s) L (s) E a (s) , de um motor e carga mostrado na Figura (1.3). A curva torque-velocidade é dada por Tm 8m 200 , quando a tensão de entrada for 100 V.
Fig. 1.3 - Sistema eletromecânico 1.9 - Obter a função de transferência linearizada, G(s) V(s) I(s) , para o circuito elétrico mostrado na Figura (1.4). O circuito contém um resistor não linear, cuja relação tensão-corrente é definida por i r e v r . A fonte de corrente i(t) é um gerador de pequeno sinal.
Fig. 1.4 - Circuito elétrico não-linear
UNIDADE I
39
1.10 - Simplifique o diagrama de blocos mostrado na Figura (1.5), e obtenha a FT de malha fechada C(s)/R(s).
Fig. 1.5 - Diagrama de blocos de um sistema 1.11 - Obtenha a representação no espaço de estados do sistema mostrado na Figura (1.6).
Fig. 1.6 - Sistema de controle 1.12 - Obtenha os modelos matemáticos dos sistemas mecânicos mostrados nas Figuras (1.7 a e b).
a)
b) Fig. 1.7 - Sistemas mecânicos
UNIDADE I
40
1.13 - Considere o sistema descrito por:
x 4 -1 x1 1 1 u e x - 1 x2 1 2 3
x1 y 1 0 x2
Obtenha a função de transferência do sistema. 1.14 - Obtenha a matriz de transferência do sistema definido por: x 1 0 0 0 x1 1 0 u1 x2 0 0 1 0 1 x2 u2 x 2 4 6 x 1 0 3 3
x1 y1 1 0 0 e x2 y2 0 1 0 x3
1.15 - Obtenha as FT X1(s) U(s) , do sistema mecânico indicado na Figura (1.8).
Fig. 1.8 - Sistema mecânico 1.16 - Represente o circuito elétrico da Figura (1.9) no espaço de estados, onde vo (t) é a saída.
Fig. 1.9 - Circuito RLC 1.17 - Obter a representação no espaço de estados do sistema mecânico mostrado na Figura (1.10).
Fig. 1.10 - Sistema mecânico 1.18 - Representar o sistema mecânico em translação, mostrado na Figura (1.11), no espaço de estados em torno do deslocamento de equilíbrio. A mola é nãolinear: a relação entre a força da mola, xs(t), e o seu deslocamento , xs(t) é
UNIDADE I
41
f s (t) 2xs2 (t) . A força aplicada é f(t) 10 f(t) , onde f(t) é uma pequena força em torno de um valor constante de 10N. Admita que a saída seja o deslocamento da massa x(t).
FIG. 1.11 - Sistema mecânico 1.19 - Obtenha a representação no espaço de estados do sistema mecânico mostrado na Figura (1.12), onde u1 e u2 são as entradas e y1 e y2 são as saídas.
Fig. 1.12 - Sistema mecânico 1.20 - A Figura (1.13) é o diagrama esquemático de um sistema do controle de leme do profundor de uma aeronave. O sinal de entrada do sistema é o ângulo , de deflexão da alavanca de controle e o sinal de saída é o ângulo de elevação . Suponha que os ângulos e sejam relativamente pequenos. Mostre que para cada valor do ângulo da alavanca de controle, existe um valor (de regime permanente), do ângulo de elevação do leme do profundor .
Fig. 1.13 - Sistema de controle do leme do profundor de uma aeronave
UNIDADE I
42 PROGRAMAS MATLAB UNIDADE I
1. Operações básicas 'Título' -3.96 -4+7i -5-6j (-4+7i)+(-5-6i) (-4+7j)*(-5-6j) M=5 N=6 P=M+N
% % % % % % % % % % % % % %
Exibe título. Exibe o número real -3,96. Exibe o número complexo -4+7i. Exibe o número complexo -5-6i. Adiciona os números complexos e Exibe a soma. Multiplica dois num. complexos e Exibe o produto. Atribui o valor 5 a M e exibe o resultado. Atribui o valor 6 a N e exibe o resultado. Atribui o valor M+N a P exibe o resultado.
pause 2. Operações com polinômios '(Título)' P1=[1 7 -3 23]
% Exibe o título. % Armazena o polinômio s^3 + 7s^2 -3s + 23 % como P1 e exibe o resultado. P2=[3 5 7 8]; % Atribui 3s^3 + 5s^2 +7s + 8 a P2 sem % mostrar na tela. P3=poly([-2 -5 -6]) % Armazena o polinômio % (s+2)(s+5)(s+6) como P3 e % exibe os coeficientes. P4=[5 7 9 -3 2] % Forma 5s^4+7s^3+9s^2-3s+2 e % exibe o resultado. raizes_P4=roots(P4) % Acha as raízes de 5s^4+7s^3+9s^2-3s+2, % atribui os valores a raizes_P4, e exibe % o resultado. P5=conv([1 7 10 9],[1 -3 6 2 1]) % Forma o produto %(s^3+7s^2+10s+9)(s^4-3s^3+6s^2+2s+1) %(3s^3+6s^2+2s+1), atribui a P5, e % mostra o resultado. Pause 3. Função de transferência numf=[7 9 12]; % Define o num. de F(s). denf=conv(poly([0 -7]),[1 10 100]); % Define o den. de F(s). [K,p,k]=residue(numf,denf)% Acha os resíduos e os atribui a K; % acha as raízes do denominador e as % atribui a p; acha a % constante e a atribui a k. pause
UNIDADE I
numy=32; % deny=poly([0 -4 -8]); % [r,p,k] = residue(numy,deny)% Calcula % Pause
43 Define o numerador. Define o denominador. os resíduos, os pólos, e o quociente.
4. Método vetorial 'Método Vetorial,Forma Polinomial,' % Exibe título. numf=150*[1 2 7] % Armazena 150(s^2+2s+7) em numf e % mostra o resultado. denf=[1 5 4 0] % Armazena s(s+1)(s+4) em denf e % mostra o resultado na tela. 'F(s)' % Exibe título. F=tf(numf,denf) % Forma F(s) e mostra o resultado. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método Vetorial,Forma Fatorada' % Exibe título. numg=[-2 -4] % Armazena (s+2)(s+4) em numg e % mostra o resultado. deng=[-7 -8 -9] % Armazena (s+7)(s+8)(s+9) em deng e % mostra o resultado. K=20 % Define K. 'G(s)' % Exibe título. G=zpk(numg,deng,K) % Forma G(s) e mostra o resultado. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método da Expressão Racional,Forma Polinomial'% Exibe título. s=tf('s') % Define 's' como um objeto LTI em % forma polinomial. F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] % Forma F(s)como uma função % de transferência % LTI em forma polinomial. G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] % Forma G(s) como uma % função de transferência % LTI em forma polinomial. clear % Apaga valores anteriores armazenados % na área de trabalho. 'Método da Expressão Racional,Forma Fatorada' % Exibe título . s=zpk('s') % Define 's' como um objeto LTI em % forma fatorada. F=150*(s^2+2*s+7)/[s*(s^2+5*s+4)] % Forma F(s)como uma % função de transferência % LTI em forma fatorada. G=20*(s+2)*(s+4)/[(s+7)*(s+8)*(s+9)] %Forma G(s)como uma % função de transferência % LTI em forma fatorada. pause
UNIDADE I
numftf=[10 40 60] denftf=[1 4 5 7]
44 % Forma o numerador de F(s) = % (10s^2+40s+60)/(s^3+4s^2+5s+7). % Forma o denominator de F(s) = % (10s^2+40s+60)/(s^3+4s^2+5s+7).
'Raízes de F(s)' % Exibe título. [numfzp,denfzp]=tf2zp(numftf,denftf) % Converte F(s) para a % forma fatorada. 'Raízes de G(s)' numgzp=[-2 -4] K=10 dengzp=[0 -3 -5]
% Exibe título. % Forma o numerador de % G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)]. % Forma o denominador de % G(s) = 10(s+2)(s+4)/[s(s+3)(s+5)].
'Coeficientes de G(s)' % Exibe título. [numgtf,dengtf]=zp2tf(numgzp',dengzp',K) % Converte G(s) % para a forma polinomial. Pause 'Fzpk1(s)' Fzpk1=zpk([-2 -4],[0 -3 -5],10)
'Ftf1' Ftf1=tf(Fzpk1)
'Ftf2' Ftf2=tf([10 40 60],[1 4 5 7])
'Fzpk2' Fzpk2=zpk(Ftf2)
% Exibe título. % Forma Fzpk1(s)= % 10(s+2)(s+4)/[s(s+3)(s+5)]. % Exibe título. % Converte Fzpk1(s) à % forma de coeficientes .
% Exibe título. % Forma Ftf2(s)= % (10s^2+40s+60)/(s^3+4s^2+5s+7). % Exibe título. % Converte Ftf2(s) à % forma fatorada.
Pause 5. Transformada de Laplace inversa syms s
% Constrói objeto simbólico para % a variável de Laplace 's'.
'Transformada de Laplace inversa' % Exibe título. F=2/[(s+1)*(s+2)^2]; % Define F(s) no exemplo do Caso 2. 'F(s) do Caso 2' % Exibe título. pretty(F) % Apresenta F(s) na forma "bonita". f=ilaplace(F); % Obtém a transformada de Laplace inversa. 'f(t) do Caso 2' % Exibe título. pretty(f) % Apresenta f(t),do Caso 2, na forma "bonita". F=3/[s*(s^2+2*s+5)]; % Define F(s) no exemplo do Caso 3. 'F(s) do Caso 3' % Exibe título.
UNIDADE I
45
pretty(F) % Apresenta F(s) do Caso 3 na forma "bonita". f=ilaplace(F); % Obtém a transformada de Laplace inversa. 'f(t) do Caso 3' % Exibe título. pretty(f) % Apresenta f(t),do Caso 3, na forma "bonita". Pause 6. Transformada de Laplace syms t
% Constrói objeto simbólico para % time variable 't'.
'Transformada de Laplace' % Exibe título. 'f(t) do Caso 2' % Exibe título. f=2*exp(-t)-2*t*exp(-2*t)-2*exp(-2*t); % Define f(t) do % exemplo do Caso 2. pretty(f) % Apresenta f(t) do Caso 2 na forma "bonita". 'F(s) do Caso 2' F=laplace(f); pretty(F)
% Exibe título. % Obtém a transformada de Laplace. % Forma "bonita" das frações parciais de % F(s) do Caso 2. F=simplify(F); % Combina frações parciais. pretty(F) % Forma "bonita" das frações parciais combinadas. 'f(t) do Caso 3' % Exibe título. f=3/5-3/5*exp(-t)*[cos(2*t)+(1/2)*sin(2*t)]; % Define f(t) do exemplo do Case 3. pretty(f) % Apresenta f(t) do Caso 3na forma "bonita" . 'F(s) do Caso 3 - Frações simbólicas' % Exibe título. F=laplace(f); % Obtém a transformada de Laplace. pretty(F) % Forma "bonita" das frações parciais de % F(s) do Caso 3. 'F(s) do Caso 3 - Representação decimal' % Exibe título. F=vpa(F,3); % Converte frações numéricas simbólicas em % representação decimal de F(s) com 3 % casas decimais. pretty(F) % Forma "bonita" da representação decimal. F=simplify(F); % Combina frações parciais. pretty(F) % Forma "bonita" das frações parciais combinadas. Pause 7. Conv. da representação numerador-denominador para espeço de estado 'Conv. da representação numerador-denominador'% Exibe título. num=24; % Define o numerador de G(s)=C(s)/R(s). den=[1 9 26 24]; % Define o denominador de G(s). [A,B,C,D]=tf2ss(num,den) % Converte G(s)para a % forma canônica % do controlador,
UNIDADE I
46
% armazena as matrizes A, B, C, D, e % mostra o resultado. % Exibe título. 8. Conv. da representação espaço de estado para numerador-denominador A=[0 1 0;0 0 1;-9 -8 -7]; B=[7;8;9]; C=[2 3 4]; D=0; [num,den]=ss2tf(A,B,C,D,1)
Tss=ss(A,B,C,D) Ttf=tf(Tss)
% Representa da matriz A. % Representa da matriz B. % Representa da matriz C. % Representa da matriz D. % Converte uma representação % no espaço de estados % em função de transferência % representada por % um numerador e um denominador,G(s)=num/den, % em forma polinomial, % e mostra num e den. % Form LTI state-space model. % Transforma a representação no espaço de % estados em função de transferência % na forma polinomial.
'Forma fatorada, Tzpk(s)' % Exibe título. Tzpk=zpk(Tss) % Transforma a representação no espaço de % estados em função de transferência % na forma fatorada. Pause
More Documents from "Rhaian Barros"

Notas_de_aula_da_unidade_i.pdf
January 2021 1

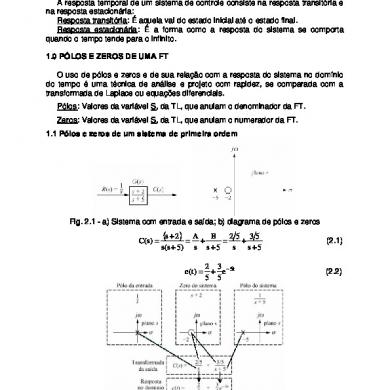
Notas_de_aula_da_unidade_ii.pdf
January 2021 1
